Кинематическое ограничение между двумя копланарными цилиндрическими зубчатыми телами с параллельными осями вращения
Simscape/Multibody/Передачи и муфты/Передачи

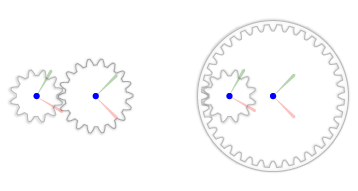
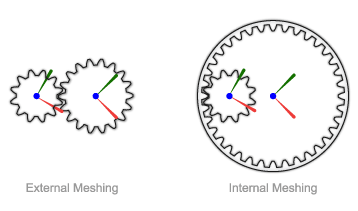
Блок Common Gear Constraint представляет кинематическое ограничение между двумя копланарными цилиндрическими зубчатыми телами с параллельными осями вращения. Зацепление с шестерней может быть внешним для обеих передач или внутренним для одной из передач. Порты основы и последующей системы координат идентифицируют системы координат соединения на зубчатые тела отгиба. Оси вращения шестерни совпадают с осями z систем координат .
Блок представляет только кинематическую характеристику ограничения для системы цилиндрической передачи. Инерция передачи и геометрия являются твердыми свойствами, которые необходимо задать с помощью твердых блоков. Модель ограничения передачи идеальна. Люфт и потери передачи из-за Кулона и вязкого трения между зубьями игнорируются. Однако можно смоделировать вязкое трение в соединениях путем определения коэффициентов демпфирования в блоках соединений.
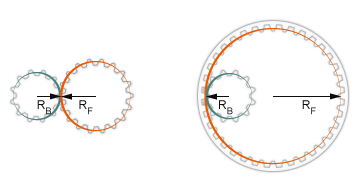
Общее ограничение передачи параметризовано с точки зрения размерностей кругов тангажа передачи. Окружность тангажа является воображаемым кругом, концентрическим зубчатому телу и касательным к точке контакта зуба. Радиусы тангажа, маркированные RB и RF На рисунке показаны радиусы, которые имели бы передачи, если бы они были сведены к цилиндрам трения во взаимном контакте.
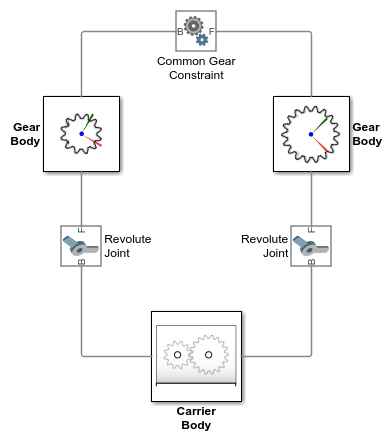
Ограничения на передачу возникают в замкнутых кинематических замкнутых цепях. Рисунок показывает топологию с обратной связью простой модели общей передачи. Блоки соединений соединяют зубчатые тела с общим фиксатором или водилом, определяя максимальные степени свободы между ними. Блок Common Gear Constraint соединяет зубчатые тела, устраняя одну степень свободы и эффективно соединяя два движения зубчатых колес.
Блок накладывает особые ограничения на относительные положения и ориентации систем координат зубчатых соединений. Ограничения гарантируют, что передачи собираются только на расстояниях и углах, подходящих для сетки. Блок применяет ограничения во время сборки блока, когда он впервые пытается поместить передачи в mesh, но полагается на оставшуюся часть модели, чтобы сохранить передачи в mesh во время симуляции.
Ограничения положения
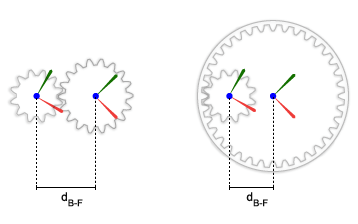
Расстояние между z-осями основы и последующей системы координат, обозначенное d B-F на рисунке, должно равняться расстоянию между центрами передач. Это ограничение гарантирует, что оси вращения передач находятся на надлежащем расстоянии для зацепления.
Центр последующей системы координат должен лежать на xy плоскости базовой системы координат. Это ограничение гарантирует, что окружность тангажа одной передачи является копланарной с окружностью тангажа другой.
Ограничения ориентации
z-оси основы и последующей системы координат должны указывать в одном направлении. Это ограничение гарантирует, что оси вращения шестерни параллельны друг другу. Рисунок показывает z -оси основы и последующей системы координат, указывающие за пределы экрана.