Перетащите все переменные системы координат из объекта KinematicsSolver
clearFrameVariables( отбрасывает все переменные системы координат из ks)KinematicsSolver ks объекта. Системы координат захватывают преобразования между любыми двумя заданными системами координат. Используйте эту функцию объекта, если ни одна из переменных системы координат больше не является релевантной - например, перед формулированием новой кинематической задачи для той же модели мультитела с использованием других переменных системы координат.
Переменные системы координат и соединений состоят из целых кинематических переменных в KinematicsSolver объект. Они могут функционировать как цели, чтобы ограничить строение мультитела, для которой можно решить неизвестных, как догадки, чтобы смещать решение к одной из одинаково правдоподобных альтернатив, когда существует несколько, и как выходы - неизвестные в анализе.
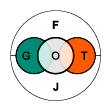
Рисунок показывает переменные общего KinematicsSolver объект. Целевые (T), начальные (G) и выходные (O) переменные могут быть переменными соединений (J) или кадровыми переменными (F). Переменные joint являются собственными для объекта и могут быть назначены с его начала как цели, догадки и выходы. Системы координат должны быть сначала созданы с addFrameVariables.
addFrameVariables | frameVariables | KinematicsSolver | removeFrameVariables
