Решите задачи кинематики для модели мультитела
KinematicsSolver объекты позволяют пользователям формулировать и численно решать задачи кинематики для своих моделей Simscape™ Multibody™. Можно использовать объект для решения стандартных задач прямой и обратной кинематики, а также более общих задач с кинематическими системами с обратной связью и несколькими целями.
Кинематическая задача сформулирована с помощью кинематических переменных. Эти переменные имеют скалярные значения, которые задают отношения между системами координат в соответствующей модели Simscape Multibody. Существует два типа кинематических переменных: joint и система координат. Переменные joint соответствуют положению соединения и состояниям скорости и создаются автоматически, когда объект построен. Вы можете просмотреть переменные соединений с помощью jointPositionVariables и jointVelocityVariables функции объекта. Переменные кадра соответствуют отношениям положения и скорости между произвольными системами координат в модели и должны быть определены с помощью addFrameVariables функция объекта. После определения они могут быть просмотрены с помощью frameVariables функция объекта.
Чтобы сформулировать задачу кинематики, необходимо назначить роли для соответствующих кинематических переменных. Существует три роли: цели, начальные догадки и выходы. Переменные назначаются этим ролям с помощью addTargetVariables , addInitialGuessVariables, и addOutputVariables функция объекта. Чтобы решить проблему с назначенными переменными, используйте solve функция объекта. Начиная с начального состояния, решатель пытается найти окончательное состояние системы, соответствующее значениям целевых переменных. Начальное состояние синтезируется с помощью значений начальных переменных guess. Начальные состояния, которые не заданы переменными initial guess, инициализируются в нуль. Значения выходных переменных получают из конечного состояния, возвращенного решателем. Если решатель не может найти окончательное состояние, которое удовлетворяет всем целям, он пытается по крайней мере вернуть состояние, которое кинематически допустимо.
ks = simscape.multibody.KinematicsSolver(modelName)KinematicsSolver объект для модели с именем в mdl. Объект содержит представление модели, подходящей для кинематического анализа. Представление является снимком модели, как и при создании объекта. Последующие изменения модели не переносятся на объект. Создайте новый объект, если необходимо, чтобы захватить эти изменения.
Модель должна содержать сеть Simscape Multibody, и вам нужно загрузить модель в память перед созданием ее KinematicsSolver объект. Если блоки модели имеют переменный MATLAB, необходимо численно задать эти переменные в рабочем пространстве модели или рабочем пространстве MATLAB. The KinematicsSolver объект игнорирует любые контакты и несколько параметров блоков соединений, таких как State Targets, Limits, Actuation и Mode Configuration. Например, во время анализа два тела могут проникнуть друг в друга, хотя существует Spatial Contact Force блок, который соединяет их. Параметры блоков установлены на Run-Time оцениваются при создании объекта и не могут быть изменены после.
A KinematicsSolver объект является указателем объектом. Созданная из него переменная содержит не копию объекта, а ссылку на нее. Переменная действует как указатель или указатель. Изменение указателя изменяет также объект и все оставшиеся указатели. Копирование объекта KinematicsSolver и добавление переменной системы координат к копии, например, добавляет эту переменную системы координат к объекту, а также к любым другим указателям.
ks = simscape.multibody.KinematicsSolver(___,Name,Value)KinematicsSolver объект с дополнительными опциями, заданными одним или несколькими Name,Value аргументы в виде пар.
Этот пример показывает, как вычислить прямую кинематику для sm_import_humanoid_urdf модель. В частности, он вычисляет положение запястья робота для заданных углов плечевого и коленного суставов.
Загрузите модель гуманоидного робота в память и создайте KinematicsSolver объект для модели. Объект содержит кинематическое представление модели и список всех переменных joint, которые она содержит.
mdl = 'sm_import_humanoid_urdf';
load_system(mdl);
fk = simscape.multibody.KinematicsSolver(mdl);Добавьте к объекту, fk, группа переменных системы координат для левого запястья. Задайте B систему координат left_wrist соединение как последующее и мировая система координат как основа. Назовите группу переменных системы координат Wrist. Теперь объект имеет шесть переменных систем координат - три для компонентов перемещения x, y и z и три для компонентов вращения x, y и z.
base = 'sm_import_humanoid_urdf/World/W'; follower = 'sm_import_humanoid_urdf/left_wrist/B'; addFrameVariables(fk,'Wrist','translation',base,follower); addFrameVariables(fk,'Wrist','rotation',base,follower);
Примечание
Пути в base и follower являются полными блочными путями от корня модели до выбранного порта нужного блока. Этот пример выбирает W порт блока World Frame в качестве базового и B портов left_wrist Блок соединений как последующий.
Использование jointPositionVariables(fk) для перечисления всех переменных соединений. Назначьте целями переменные шарнира для колена (j2.Rz.q), лобового плеча (j6.Rz.q) и обочины сагиттала (j7.Rz.q).
jointPositionVariables(fk) targetIDs = ["j2.Rz.q";"j6.Rz.q";"j7.Rz.q"]; addTargetVariables(fk,targetIDs);
Используйте frameVariables(fk) отобразить все переменные системы координат и назначить их в Wrist группировать как выходы.
frameVariables(fk) outputIDs = ["Wrist.Translation.x";"Wrist.Translation.y";... "Wrist.Translation.z";"Wrist.Rotation.x";"Wrist.Rotation.y";"Wrist.Rotation.z"]; addOutputVariables(fk,outputIDs);
Решите задачу прямой кинематики, учитывая локоть, лобовое плечо и сагиттальные углы поворота шарнира 30, 45, и 45 степени.
targets = [30,45,45]; [outputVec,statusFlag] = solve(fk,targets)
outputVec =
0.2196
0.0584
-0.0983
135.0000
0.0027
-15.0000
statusFlag =
1 solve функция возвращает значения выходных переменных. Значения сортируются в том же порядке, что и выходные переменные. Эти модули являются значениями по умолчанию m для компонентов перевода и deg для компонентов вращения. The statusFlag показывает, что все ограничения модели и целевые переменные удовлетворены.
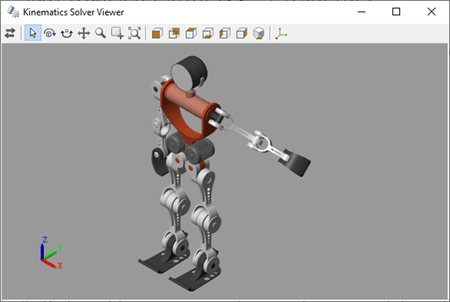
Просмотр решения.
viewSolution(fk);
Закройте средство просмотра.
closeViewer(fk);
Этот пример показывает, как вычислить обратную кинематику для sm_import_humanoid_urdf модель. В частности, он вычисляет углы коленного и плечевого суставов, соответствующие желаемому положению запястья. Поскольку эта задача имеет несколько решений, начальные догадки для плечевых углов поворота шарнира используются, чтобы направить решатель к желаемому решению.
Загрузите модель гуманоидного робота в память и создайте KinematicsSolver объект для модели. Объект содержит кинематическое представление модели и список всех переменных joint, которые она содержит.
mdl = 'sm_import_humanoid_urdf';
load_system(mdl);
ik = simscape.multibody.KinematicsSolver(mdl);Добавьте к объекту, ik, группа переменных системы координат для правого запястья. Задайте B систему координат right_wrist соединение как последующее и мировая система координат как основа. Назовите группу переменных системы координат Wrist. Теперь объект имеет три переменные системы координат для компонентов преобразования x, y и z.
base = 'sm_import_humanoid_urdf/World/W'; follower = 'sm_import_humanoid_urdf/right_wrist/B'; addFrameVariables(ik,'Wrist','translation',base,follower);
Примечание
Пути в base и follower являются полными блочными путями от корня модели до выбранного порта нужного блока. Этот пример выбирает W порт блока World Frame в качестве базового и B портов right_wrist Блок соединений как последующий.
Используйте frameVariables(ik) отобразить все переменные системы координат и назначить их в Wrist группировать как цели.
frameVariables(ik) targetIDs = ["Wrist.Translation.x";"Wrist.Translation.y";"Wrist.Translation.z"]; addTargetVariables(ik,targetIDs);
Примечание
Не все переменные системы координат необходимы в анализе. Можно использовать frameVariables(ik) чтобы отобразить все переменные системы координат, а затем выбрать требуемые переменные для анализа.
Использование jointPositionVariables(ik) для перечисления всех переменных соединений и присвоения в качестве выходных параметров переменных соединений для колена (j10.Rz.q), фронтального плеча (j14.Rz.q) и сагиттала плеча (j15.Rz.q).
jointPositionVariables(ik) outputIDs = ["j10.Rz.q";"j14.Rz.q";"j15.Rz.q"]; addOutputVariables(ik,outputIDs);
Вычислите углы поворота шарнира для колена и плеча, соответствующие положению запястья [-0.16,-0.12,0] m.
targets = [-0.16,-0.12,0]; [outputVec,statusFlag] = solve(ik,targets)
solve функция возвращает значения выходных переменных - углы поворота колена, лобовой части плеча и сагиттали плеча, каждый в модули по умолчанию deg. The statusFlag показывает, что все ограничения модели и целевые переменные удовлетворены.
outputVec =
-52.8384
-71.6077
172.9586
statusFlag =
1Визуализируйте решение в Kinematics Solver Viewer и определите, является ли оно разумным.
viewSolution(ik);
Нажмите Front View кнопку на панели инструментов, чтобы просмотреть результат.
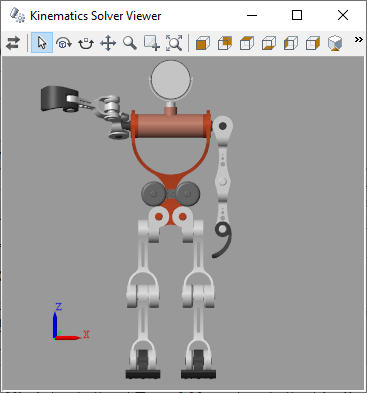
Правое запястье находится в нужной области кадра, но правая рука имеет неестественное положение. Обратите внимание, что это решение является одним из возможных решений этой задачи. Можно задать соединения плеча как переменные предположения, чтобы иметь лучшее решение.
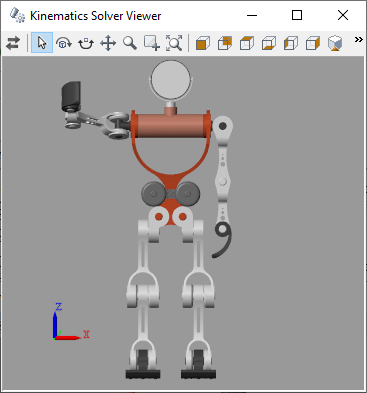
Установите переменные лобового и плечного сагиттальных соединений как переменные предположения и еще раз запустите анализ для вращений [90,90] deg.
guessesIDs=["j14.Rz.q","j15.Rz.q"]; guesses = [90,90]; addInitialGuessVariables(ik,guessesIDs); [outputVec,statusFlag] = solve(ik,targets,guesses)
solve функция возвращает новое решение для углов поворота шарнира.
outputVec =
-52.8384
108.3891
55.5025
statusFlag =
1Нажмите кнопку Update Visualization![]() , чтобы обновить Kinematics Solver Viewer, чтобы визуализировать результаты.
, чтобы обновить Kinematics Solver Viewer, чтобы визуализировать результаты.
Закройте средство просмотра.
closeViewer(ik);
addFrameVariables | addInitialGuessVariables | addOutputVariables | addTargetVariables | clearFrameVariables | clearInitialGuessVariables | clearOutputVariables | clearTargetVariables | closeViewer | frameVariables | generateCode | initialGuessVariables | jointPositionVariables | jointVelocityVariables | outputVariables | removeFrameVariables | removeInitialGuessVariables | removeOutputVariables | removeTargetVariables | setVariableUnit | solve | targetVariables | viewSolution