Перетащите выбранные переменные системы координат из объекта KinematicsSolver
removeFrameVariables( капли из ks,ids)KinematicsSolver ks объекта переменные системы координат с именем в ids. Системы координат захватывают преобразования между любыми двумя заданными системами координат. Используйте эту функцию, чтобы удалить просто подмножество переменных системы координат, если они устареют. Переменные того же типа и в одной группе должны быть удалены вместе.
Выходом является обновленная таблица с переменными системы координат - теми, которые остаются - в строках. Каждая строка задает идентификатор переменной, базовую систему координат, против которого задано его преобразование, последующая система координат, который описывает преобразование, и модуль для своего числового значения.
Переменные системы координат и соединений состоят из целых кинематических переменных в KinematicsSolver объект. Они могут функционировать как цели, чтобы ограничить строение мультитела, для которой можно решить неизвестных, как догадки, чтобы смещать решение к одной из одинаково правдоподобных альтернатив, когда существует несколько, и как выходы - неизвестные в анализе.
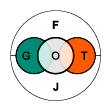
Рисунок показывает переменные общего KinematicsSolver объект. Целевые (T), начальные (G) и выходные (O) переменные могут быть переменными соединений (J) или кадровыми переменными (F). Переменные joint являются собственными для объекта и могут быть назначены с его начала как цели, догадки и выходы. Системы координат должны быть сначала созданы с addFrameVariables.
addFrameVariables | clearFrameVariables | frameVariables | KinematicsSolver
