Универсальный (или последовательный) двигатель с электрическими и крутящими характеристиками
Simscape/Электрический/Электромеханический/Коллекторные двигатели
Блок Universal Motor представляет электрические и крутящие характеристики универсального (или последовательного) двигателя с помощью следующей модели эквивалентной схемы.
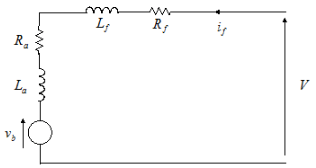
Где:
Ra - сопротивление якоря.
La - индуктивность якоря.
Rf - сопротивление обмотки возбуждения.
Lf - индуктивность обмотки возбуждения.
Когда вы устанавливаете параметр Model parameterization равным By equivalent circuit parameters, вы задаете эквивалентные параметры схемы для этой модели. Блок Universal Motor вычисляет крутящий момент двигателя следующим образом:
Магнитное поле в двигателе индуцирует следующий задний ЭДС vb в якоре:
где Laf - константа пропорциональности, и ω - скорость вращения.
Механическая степень равна степени, на которую реагирует коэффициент противо-ЭДС:
Это крутящий момент двигателя:
Характеристика крутящий момент-скорость для модели блока Universal Motor связана с параметрами на предыдущем рисунке. Когда вы устанавливаете параметр Model parameterization равным By DC rated power, rated speed & maximum torque или By DC rated power, rated speed & electrical powerблок решает для эквивалентных параметров схемы следующим образом:
Для зависимости крутящий момент и скорость при использовании источника постоянного тока L не имеет никакого эффекта.
Суммируйте напряжения вокруг цикла:
Решите предыдущее уравнение, если и замените это значение в уравнение для крутящего момента:
Блок использует номинальную скорость и степень, чтобы вычислить номинальный крутящий момент. Блок использует номинальный крутящий момент и значения номинальной скорости в предыдущем уравнении плюс соответствующая электроэнергия, чтобы определить значения для Rf + Ra и Laf.
Когда вы устанавливаете параметр Model parameterization равным By AC rated power, rated speed, current & electrical power, тогда блок должен включать индуктивные условия La и Lf в модель. Это требует информации о номинальном токе RMS и напряжении для общей индуктивности.
Блок моделирует инерцию двигателя J и демпфирование B для всех значений параметра Model parameterization. Крутящий момент выхода:
Блок производит положительный крутящий момент, действующий от механических портов C к R.
Блок имеет два опциональных тепловых порта, по одному на обмотку, скрытых по умолчанию. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Temperature Dependence и Thermal Port. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты потерь сопротивления меди, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
[1] Bolton, W. Mechatronics: Electronic Control Systems in Mechanical and Electrical Engineering, 3-е издание Pearson Education, 2004.

