Ток асинхронной машины в дискретном времени ПИ-контроллера
Simscape / Электрический / Контроль / Контроль за Асинхронной машиной
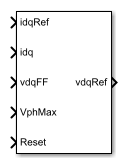
Этот Induction Machine Current Controller реализует дискретное пропорционально-интегральное (PI) управление током асинхронной машины в d q ротора - системе отсчета. Обычно вы используете Induction Machine Current Controller в серии блоков, которые составляют структуру управления. Например, чтобы преобразовать dq0 выходное напряжение системы координат в напряжение в abc системе координат, соединитесь Induction Machine Current Controller с Inverse Clarke Transform в структуре управления.
Блок использует метод дискретизации Эйлера назад.
Два токовых контроллеров PI, которые реализованы в исходной системе координат ротора, создают вектор ссылки напряжения:
и
где
, и являются d -осью и q -осью опорных напряжений, соответственно.
, и являются d -осью и q -осью ссылочных токов, соответственно.
и являются d осями и q -оси, соответственно.
Kp_id и Kp_iq являются пропорциональными составляющими для контроллеров d-оси и q-оси, соответственно.
Ki_id и Ki_iq являются интегральными составляющими для контроллеров d-оси и q-оси, соответственно.
vd_FF и vq_FF являются напряжениями с feedforward для осей d -оси и q -оси, соответственно. Feedforward связью получаются из математических уравнений машины и предоставляются в качестве входов.
Ts является шагом расчета дискретного контроллера.
Насыщение налагается, когда вектор напряжения статора превышает предел фазы напряжения Vph_max:
где vd, и vq - d напряжения оси и q осей, соответственно.
В случае расстановки приоритетов по оси вводятся v1 и v2 напряжения, где:
Для d -оси приоритезации — v1 = vd и v2 = vq.
Для q приоритетов оси — v1 = vq и v2 = vd.
Ограниченные (насыщенные) напряжения и получаются как:
и
где:
и являются без ограничений (ненасыщенными) напряжениями.
v2_max - максимальное значение v2, которое не превышает предел фазы напряжения. Уравнение, которое задает v2_max,
В случае d - q эквивалентности прямая и квадратурная оси имеют одинаковый приоритет, и ограниченные напряжения :
и
где:
и
Чтобы избежать насыщения выходного сигнала интегратора, используется механизм защиты от обмотки возбуждения. В такой ситуации коэффициент усиления интегратора становится:
и
где Kaw_id, Kaw_iq и Kaw_if являются коэффициентами усиления анти-обмотки для d-оси, q-оси и контроллеров возбуждения, соответственно.
Модели объекта управления для прямой и квадратурной осей могут быть аппроксимированы системой первого порядка.

