Асинхронная машина DTC
Simscape / Электрический / Контроль / Контроль за Асинхронной машиной
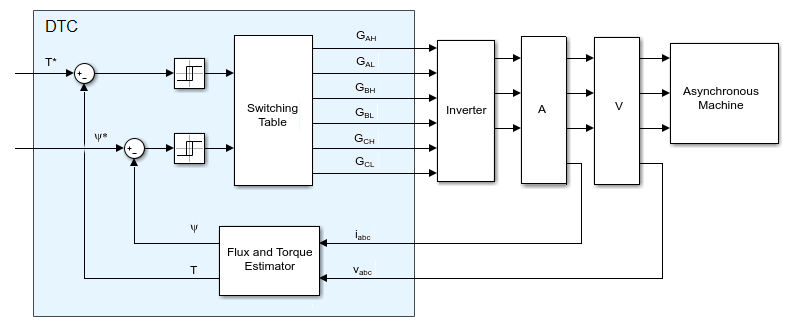
Блок Induction Machine Direct Torque Control реализует структуру управления прямым крутящим моментом асинхронной машины (DTC). Рисунок показывает эквивалентную схему для блока.
Чтобы оценить крутящий момент и поток, Induction Machine Direct Torque Control блок дискретизирует уравнения напряжения машины в стационарной < reservedrangesplaceholder1 > системе координат используя метод Эйлера назад. Уравнения в дискретном времени для потоков статора в ɑβ системе координат:
и
где:
vɑ - ɑ напряжение оси.
iɑ - ɑ ток оси.
Rs - сопротивление статора.
Ψɑ - ɑ поток статора оси.
vβ - β напряжение оси.
iβ - β ток оси.
Ψβ - β поток статора оси.
Блок вычисляет крутящий момент и поток как:
и
где:
p - количество пар полюсов.
Ψs - поток статора.
Чтобы обнаружить ошибки расчета потока и крутящего момента, блок использует компараторы гистерезиса. Рисунок показывает компараторы гистерезиса и связанные секторы переключения.
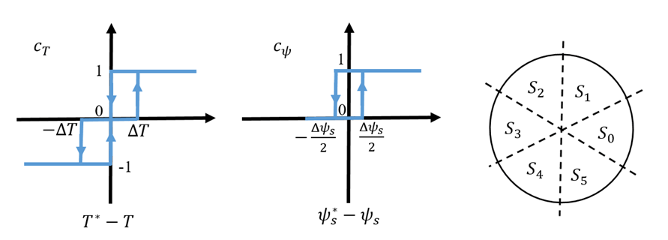
Таблица показывает оптимальное переключение для системы с высокой стороной инвертора.
| cΨ, <reservedrangesplaceholder2> <reservedrangesplaceholder1> (<reservedrangesplaceholder0>) | S0 | S1 | S2 | S3 | S4 | S5 | |
|---|---|---|---|---|---|---|---|
| cВ = 1 | cT = 1 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 |
| cT = 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | |
| cT =-1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | |
| cВ = 0 | cT = 1 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 |
| cT = 0 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | |
| cT =-1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | |
Время отключения инвертора степени не учитывается. Для аппаратной реализации добавьте мертвое время внешне.
[1] Такахаси, И., и Т. Ногути. Новая стратегия быстрого и высокоэффективного управления асинхронным двигателем. Транзакции IEEE для отраслевых приложений. Том IA-22, № 5, 1986, с. 820 - 827.

