Per-unit discrete-time induction machine FOC
Simscape / Electrical / Control / Induction Machine Control
The Induction Machine Field-Oriented Controller block implements an induction machine field-oriented control (FOC) structure using the per-unit system. To decouple the torque and flux, FOC uses the rotor d-q reference frame. The figure shows the control structure.
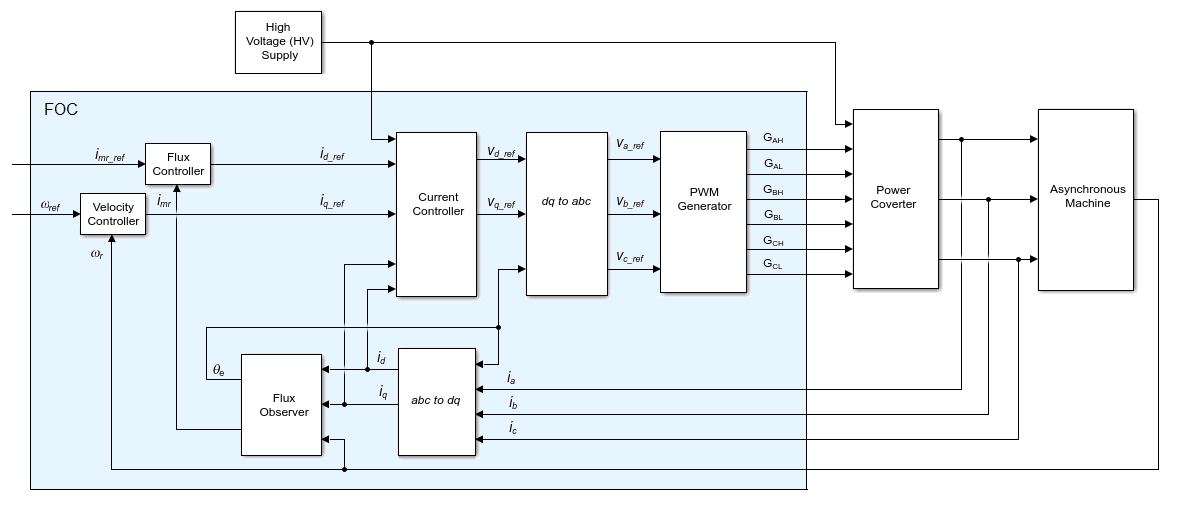
In the diagram:
ωr is the measured angular velocity.
ωref is the reference angular velocity.
id and iq are the d- and q-axis stator currents.
ia, ib, and ic are the a-, b- and c-phase stator winding currents.
imr_ref is the reference magnetizing current.
imr is the magnetizing current.
vd and vq are the d- and q-axis stator voltages.
va, vb, and vc are the a-, b- and c-phase stator winding voltages.
θe is the rotor electrical angle.
GAH, GAL, GBH, GBL, GCH, and GCL are the a-, b- and c-phase high (H) and low(L) gate pulses.
The machine parameters are known.
The implementation uses the per-unit system.
The control structure implementation uses a single sample rate.

