Дискретное управление однофазной асинхронной машиной в относительных единицах
Simscape / Электрический / Контроль / Контроль за Асинхронной машиной
Блок Induction Machine Field-Oriented Control (Single-Phase) реализует однофазную структуру управления асинхронной машиной, ориентированную на поле.
Векторная архитектура управления для однофазной асинхронной машины:
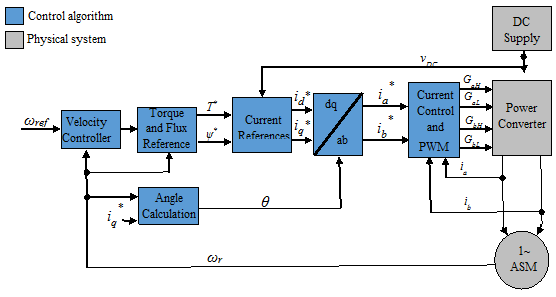
Вы можете предоставить ссылку на крутящий момент в качестве входа, в случае регулировки скорости, сгенерировать ссылку внутри с помощью контроллер скорости. Ссылка крутящего момента, полученная из контроллер скорости:
где ωr - угловая механическая скорость ротора в рад/с.
Блок генерирует ссылку на поток как
где:
p - количество пар полюсов.
fn - номинальная частота.
ψn - номинальный поток.
Ссылки на ток получаются из параметров машины:
где:
Lms является основной обмоткой взаимной индуктивности.
Llar - индуктивность утечек ротора основной обмотки.
a - отношение поворота вспомогательных обмоток к основным.
Угол вычисляется путем решения:
Преобразование в стационарную систему координат осуществляется с помощью:
Структура управления реализована в одной частоте дискретизации.
[1] Корреа, М. Б. Р., Якобина, К. Б., Лима, А. М. Н., Да Силва, Е. Р. С. «Векторное управление приводом однофазного асинхронного двигателя». Запись PESC 98. 29-я ежегодная конференция IEEE Power Electronics Specialists. Том 2, 1998, с. 990 - 996.
