Сгенерируйте трехфазную, двухуровневую импульсно-модулированную форму волны
Simscape / Электрический / Контроль / Модуляция Ширины импульса
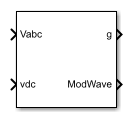
Блок PWM Generator (Three-phase, Two-level) управляет поведением переключения для трехфазного двухуровневого преобразователя степени. Блок:
Вычисляет время включения и выключения на основе блока входов:
Три синусоидальных опорных напряжения, по одному на фазу
Постоянное напряжение канала
Использует время управления ключом, чтобы сгенерировать шесть импульсов управления ключом.
Использует время стробирования, чтобы сгенерировать формы волны модуляции.
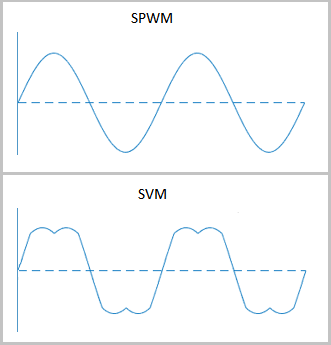
Блок обеспечивает режимы как непрерывной, так и прерывистой модуляции ширины импульса (PWM). Рисунок показывает общее различие между непрерывными синусоидальными формами PWM (SPWM) и непрерывной векторной модуляцией (SVM).
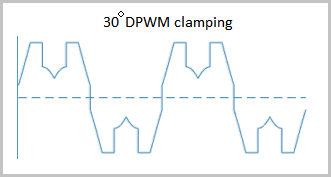
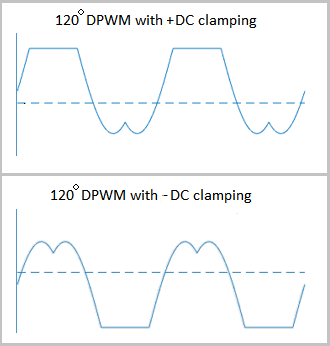
Для прерывистого ШИМ (DPWM) блок зажимает волну модуляции к положительному или отрицательному рельсу постоянного тока в общей сложности на 120 степени в течение каждого основного периода. Во время интервалов зажима модуляция прекращается.
Форма волны с 30-градусным DPWM имеет четыре 30-градусных интервала на основной период.
Выбор положительного или отрицательного сдвига фазы на 30 градусов влияет на интервалы зажима для DPWM на 60 градусов.
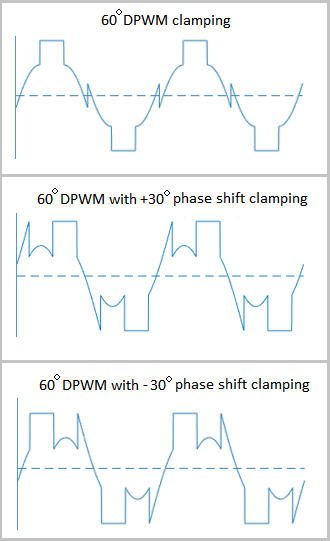
Рисунок показывает формы волны для положительного и отрицательного зажима постоянного тока для 120-градусного DPWM.
Этот блок позволяет вам выбрать естественную, симметричную или асимметричную дискретизацию волны модуляции.
Блок PWM Generator (Three-phase, Two-level) не выполняет ШИМ на основе несущей. Вместо этого блок использует входные сигналы, чтобы вычислить время стробирования, а затем использует время стробирования, чтобы сгенерировать как импульсы управления переключателем, так и формы модуляции, которые он выводит.
Основанный на несущей ШИМ, однако, полезен для демонстрации того, как выбранный вами режим дискретизации относится к поведению включения и выключения импульсов, которые генерирует блок. Генератор, который использует двухуровневый метод PWM на основе несущей:
Дискретизирует ссылку волну.
Сравнивает выборку с треугольной несущей волной.
Генерирует импульс включения, если выборка выше, чем сигнал несущей, или импульс выключения, если выборка ниже, чем несущая волна.
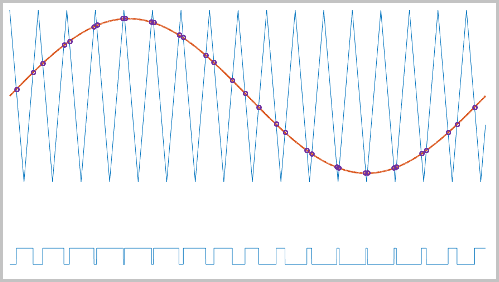
Чтобы определить поведение импульсов включения и выключения, двухуровневый генератор PWM на основе несущей использует эти методы, чтобы дискретизировать треугольную волну:
Естественно - дискретизация и сравнение происходят в точках пересечения волны модуляции и волны несущей.
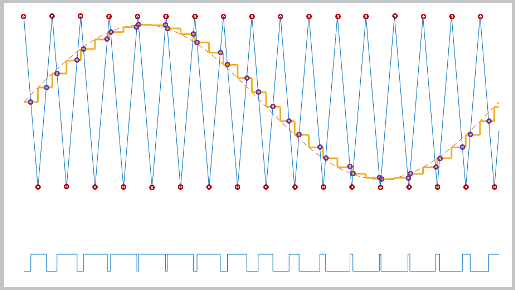
Асимметричная - Дискретизация происходит на верхних и нижних контурах несущей волны. Сравнение происходит на пересечении, которое следует за выбором.
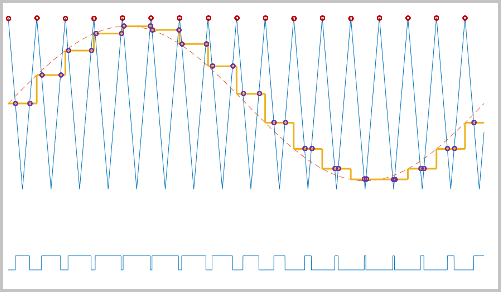
Симметричная - Дискретизация происходит только на верхнем контуре несущей волны. Сравнение происходит на пересечении, которое следует за выбором.
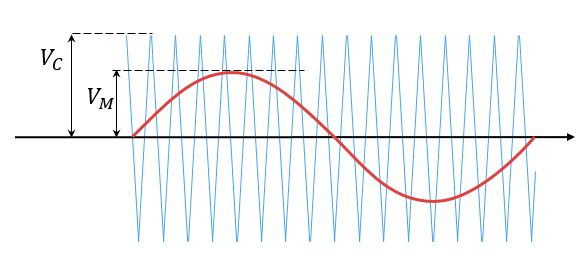
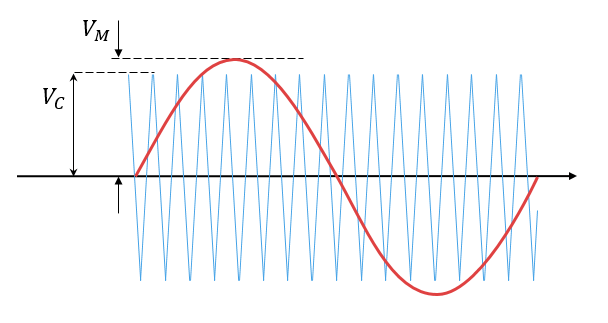
Индекс модуляции, который измеряет способность преобразователя степени выдавать заданное напряжение, задан как
где
m - индекс модуляции.
Vm - пиковое значение волны модуляции.
Vc - пиковое значение несущей волны треугольника.
Для трехфазного SPWM,
где
Vpeak - пиковое значение основного компонента напряжения «фаза-нейтраль».
vdc - напряжение постоянного тока.
Для трехфазного вектора пространства PWM (SVM) и DPWM,
Для нормальной установившейся операции, 0 <<reservedrangesplaceholder1> ≤ <reservedrangesplaceholder0>. Если переходный процесс, такой как увеличение нагрузки, заставляет амплитуду Vm превышать амплитуду Vc, избыточной модуляции (m > 1) происходит.
Если происходит перенапряжение, выходное напряжение преобразователя степени зажимается к положительной или отрицательной рейке постоянного тока.
В примере трехфазного двухуровневого PWM-генератора Two-Level Controller подсистема содержит 400-V вход DC-канала и индекс модуляции, m, 0,8. Для SPWM максимальное входное напряжение составляет 400 V/2, то есть 200 В. Чтобы продемонстрировать избыточную модуляцию, в начале симуляции добавляется переходный процесс. Переходный процесс заставляет амплитуды опорных напряжений превышать амплитуду 1/2 напряжения постоянного тока. Чтобы выделить избыточную модуляцию, возможности включают результаты симуляции только для одного из шести выходных импульсов и только a-фазы опорных напряжений, форм волны модуляции и выходных напряжений.
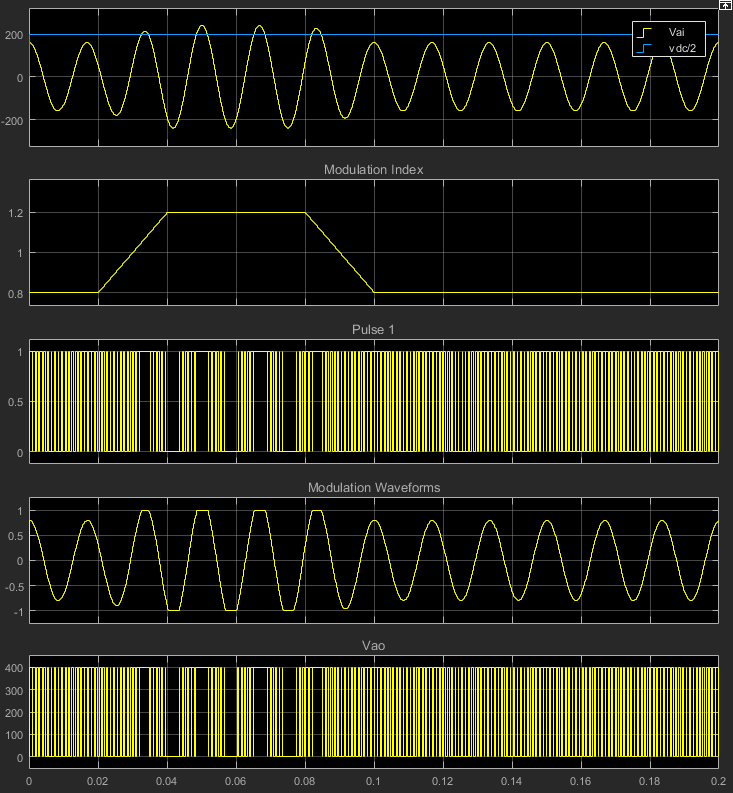
Индекс модуляции больше единицы между 0,03-0,09 секундами. Во время избыточной модуляции:
Импульс остается в положении включения или выключения.
Напряжение выхода, Vao, зажимы к положительному или отрицательному рельсу постоянного тока.
[1] Chung, D. W., J. S. Kim, and S. K. Sul. Унифицированный метод модуляции напряжения для трехфазного преобразования степени в реальном времени. Транзакции IEEE по отраслевым приложениям, том 34, № 2, 1998, стр. 374-380.
[2] Hava, A. M., R. J. Kerkman, and T. A. Lipo. «Простые аналитические и графические методы для накопителей PWM-VSI на основе несущей». Транзакции IEEE по степени, том 14, № 1, 1999, стр. 49-61.

















