Синхронная машина в дискретном или непрерывном времени ST3C статической системой возбуждения с автоматическим регулятором напряжения
Simscape/Электрический/Управление/SM Управление
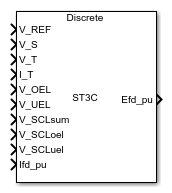
Блок SM ST3C реализует системную модель статического возбуждения ST3C типа синхронной машины в соответствии с IEEE 421.5-2016[1].
Используйте этот блок для моделирования управления и регулирования напряжения возбуждения синхронной машины.
Можно переключаться между непрерывной и дискретной реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратора на непрерывное время, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратора на дискретное время, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение или на -1 наследование шага расчета из вышестоящего блока.
Блок SM ST3C содержит четыре основных компонента:
Компенсатор Тока изменяет измеренное напряжение контакта как функцию от тока контакта.
Преобразователь Измерения Напряжения моделирует динамику терминального преобразователя напряжения с помощью lowpass фильтра.
Компонент Элементы Управления Возбуждением сравнивает выход преобразователя напряжения с терминальным опорным напряжением, чтобы создать ошибку напряжения. Затем эта ошибка напряжения передается через регулятор напряжения для создания напряжения возбуждения.
Источник Степени моделирует источник степени для управляемого выпрямителя, когда он является независимым от напряжения контакта.
Эта схема показывает общую структуру системной модели ST3C возбуждения:
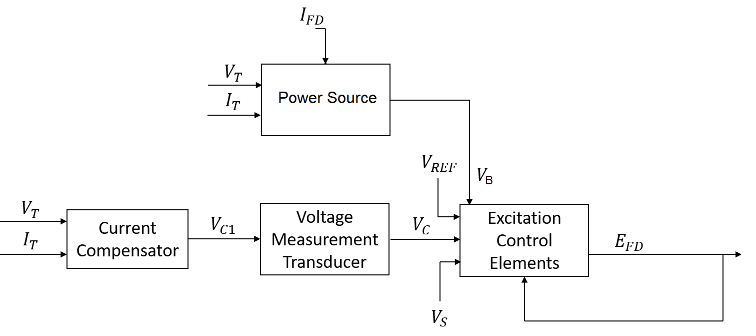
На схеме:
VT и IT являются измеренными контактным напряжением и током синхронной машины.
VC1 - токо-компенсируемое контактное напряжение.
VC - фильтрованное, компенсированное током напряжение контакта.
VREF - базовое напряжение клеммы.
VS - напряжение стабилизатора степени.
VB - напряжение возбуждающего поля.
EFD и IFD являются напряжением возбуждения и током, соответственно.
В следующих разделах подробно описывается каждая из основных частей блока.
Компенсатор тока моделируется как:
где:
RC - сопротивление компенсации нагрузки.
XC - реактивное сопротивление компенсации нагрузки.
Преобразователь измерения напряжения реализован как Low-Pass Filter блок с постоянными по времени TR. Дискретные и непрерывные реализации см. в документации для блока Low-Pass Filter.
Эта схема иллюстрирует общую структуру элементов управления возбуждением:
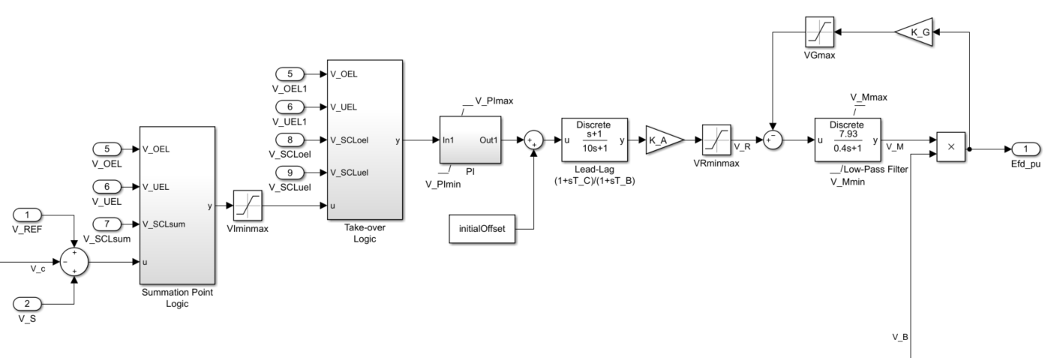
На схеме:
Подсистема Summation Point Logic моделирует точку суммирования входа местоположение для ограничителя сверхэксцитирования (OEL), ограничителя недискриминации (UEL), ограничителя тока статора (SCL) и степени переключателя (V_S) напряжения. Для получения дополнительной информации об использовании ограничителей с этим блоком, смотрите Полевые ограничители тока.
Подсистема Take-over Logic моделирует входное расположение точки захвата для напряжений OEL, UEL и SCL. Для получения дополнительной информации об использовании ограничителей с этим блоком, смотрите Полевые ограничители тока.
Подсистема PI моделирует ПИ-контроллер этих функций как структуру управления для автоматического регулятора напряжения и позволяет представлять модернизацию оборудования с современным цифровым контроллером. Минимальные и максимальные пределы насыщения против насыщения обмотки для блока VPImin и VPImax, соответственно.
Блок Lead-Lag моделирует дополнительную динамику, связанную с регулятором напряжения, и представляет собой стабилизатор системы. Здесь TC - постоянная времени выполнения, а TB - постоянная времени задержки. Для получения точных дискретных и непрерывных реализаций см. документацию по этому блоку.
Внутренний цикл управления напряжением поля используется для линеаризации характеристики управления возбудителем, и он состоит из коэффициентов усиления KM и KG и постоянной времени TM. Минимальные и максимальные пределы насыщения против насыщения обмотки для блока VMmin и VMmax, соответственно.
Можно использовать различные ограничители тока возбуждения, чтобы изменить выход регулятора напряжения в небезопасных условиях работы:
Используйте ограничитель перенапряжения, чтобы предотвратить перегрев обмотки возбуждения из-за чрезмерной потребности в токе возбуждения.
Используйте ограничитель недооценки, чтобы увеличить возбуждение поля, когда оно слишком низко, что рискует десинхронизацией.
Используйте ограничитель тока статора, чтобы предотвратить перегрев обмоток статора из-за сверхтоков.
Приложите выход любого из этих ограничителей в одной из следующих точек:
Точка суммирования как часть цикла обратной связи автоматического регулятора напряжения (AVR)
Точка принятия для переопределения обычного поведения AVR
Если вы используете ограничитель тока статора в точке суммирования, используйте одну входную VSCLsum. Если вы используете ограничитель тока статора в точке захвата, используйте и вход перенапряжения, и VSCLoel, и вход недискажения, VSCLuel.
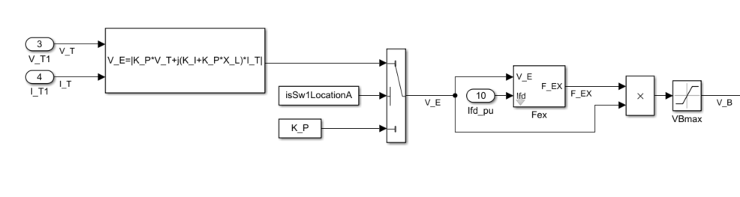
Можно принять другое представление источника степени для управляемого выпрямителя, выбрав соответствующую опцию в параметре Power source selector. Источник степени для управляемого выпрямителя может быть либо выведен из напряжения контакта (Position A: power source derived from generator terminal voltage) или это может быть независимо от напряжения на клемме (Position B: power source independent of generator terminal conditions).
Эта схема показывает модель источника степени возбудителя, использующего фазорную комбинацию терминального напряжения, VT и терминального тока, IT:
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
