Синхронная машина в дискретном или непрерывном времени ST1C статической системой возбуждения с автоматическим регулятором напряжения
Simscape/Электрический/Управление/SM Управление
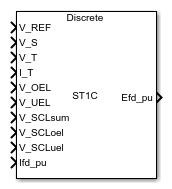
Блок SM ST1C реализует системную модель статического возбуждения ST1C типа синхронной машины в соответствии с IEEE 421.5-2016[1].
Используйте этот блок для моделирования управления и регулирования напряжения возбуждения синхронной машины.
Можно переключаться между непрерывной и дискретной реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратора на непрерывное время, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратора на дискретное время, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение или на -1 наследование шага расчета из вышестоящего блока.
Блок SM ST1C содержит три основных компонента:
Компенсатор Тока изменяет измеренное напряжение контакта как функцию от тока контакта.
Преобразователь Измерения Напряжения моделирует динамику терминального преобразователя напряжения с помощью lowpass фильтра.
Компонент Элементы Управления Возбуждением сравнивает выход преобразователя напряжения с терминальным опорным напряжением, чтобы создать ошибку напряжения. Затем эта ошибка напряжения передается через регулятор напряжения для создания напряжения возбуждения.
Эта схема показывает общую структуру системной модели ST1C возбуждения:
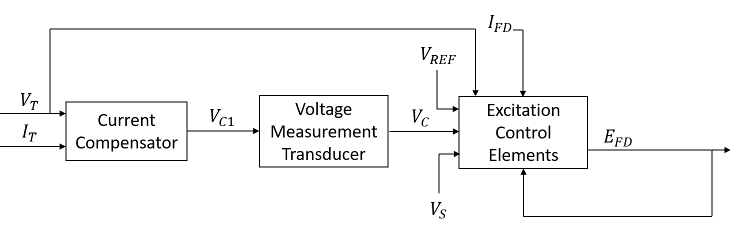
На схеме:
VT и IT являются измеренными контактным напряжением и током синхронной машины.
VC1 - токо-компенсируемое контактное напряжение.
VC - фильтрованное, компенсированное током напряжение контакта.
VREF - базовое напряжение клеммы.
VS - напряжение стабилизатора степени.
EFD и IFD являются напряжением возбуждения и током, соответственно.
В следующих разделах подробно описывается каждая из основных частей блока.
Компенсатор тока моделируется как:
где:
RC - сопротивление компенсации нагрузки.
XC - реактивное сопротивление компенсации нагрузки.
Преобразователь измерения напряжения реализован как Low-Pass Filter блок с постоянными по времени TR. Дискретные и непрерывные реализации см. в документации для блока Low-Pass Filter.
Эта схема иллюстрирует общую структуру элементов управления возбуждением:
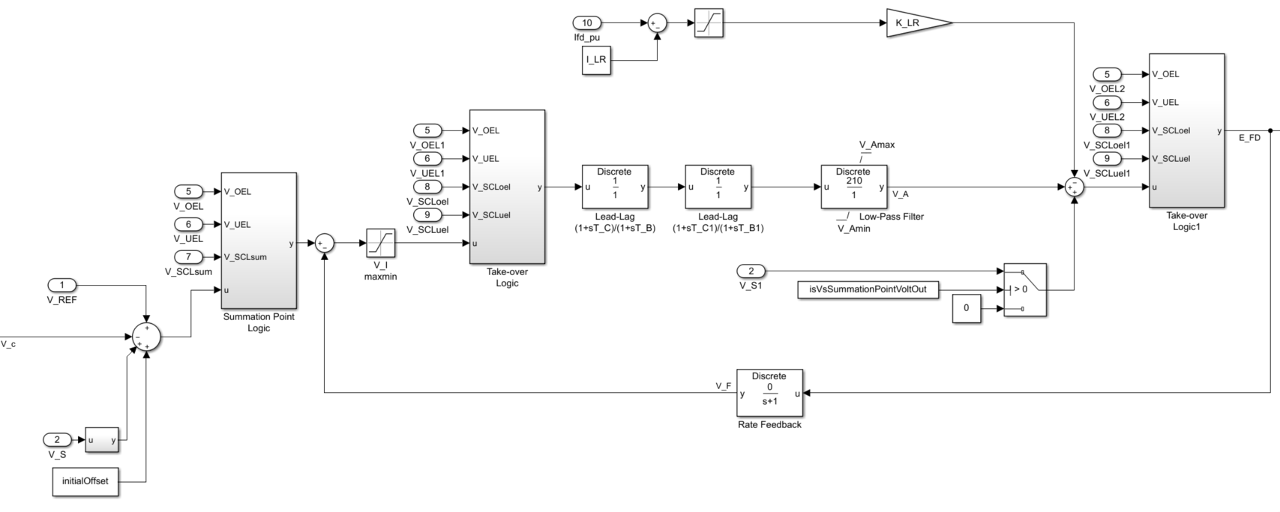
На схеме:
Подсистема Summation Point Logic моделирует точку суммирования входа местоположение для ограничителя сверхэксцитирования (OEL), ограничителя недискриминации (UEL), ограничителя тока статора (SCL) и степени переключателя (V_S) напряжения. Для получения дополнительной информации об использовании ограничителей с этим блоком, смотрите Полевые ограничители тока.
Существует две логические подсистемы Take-over. Подсистемы моделируют входное положение входа захвата для напряжений OEL, UEL, SCL и PSS. Для получения дополнительной информации об использовании ограничителей с этим блоком, смотрите Полевые ограничители тока.
Два блока Lead-Lag моделируют дополнительную динамику, связанную с регулятором напряжения. Первый представляет кратковременное уменьшение усиления, где TC - постоянная времени выполнения, а TB - постоянная времени задержки. Последнее позволяет представлять кратковременное увеличение усиления, где TC1 - постоянная времени выполнения, а TB1 - постоянная времени задержки. Дискретные и непрерывные реализации см. в документации для блока Lead-Lag.
Блок Low-Pass Filter моделирует основную динамику регулятора напряжения. Здесь KA - коэффициент усиления регулятора, а TA - основная временная константа регулятора. Минимальные и максимальные пределы насыщения против насыщения обмотки для блока VAmin и VAmax, соответственно.
Блок Filtered Derivative моделирует путь обратной связи скорости для стабилизации системы возбуждения. Здесь KF и TF являются константами усиления и времени этой системы, соответственно. Дискретные и непрерывные реализации см. в документации для блока Filtered Derivative.
Из-за очень высокой принудительной способности в модели используется ограничитель тока возбуждения для защиты ротора генератора и возбудителя. Начальный порог и коэффициент усиления определяются ILR и KLR, соответственно. Если вы используете явную модель OEL, отключите этот ограничитель тока поля, установив коэффициент усиления, KLR, равным 0.
Можно использовать различные ограничители тока возбуждения, чтобы изменить выход регулятора напряжения в небезопасных условиях работы:
Используйте ограничитель перенапряжения, чтобы предотвратить перегрев обмотки возбуждения из-за чрезмерной потребности в токе возбуждения.
Используйте ограничитель недооценки, чтобы увеличить возбуждение поля, когда оно слишком низко, что рискует десинхронизацией.
Используйте ограничитель тока статора, чтобы предотвратить перегрев обмоток статора из-за сверхтоков.
Приложите выход любого из этих ограничителей в одной из следующих точек:
Точка суммирования как часть цикла обратной связи автоматического регулятора напряжения (AVR)
Точка принятия для переопределения обычного поведения AVR
Если вы используете ограничитель тока статора в точке суммирования, используйте одну входную VSCLsum. Если вы используете ограничитель тока статора в точке захвата, используйте и вход перенапряжения, и VSCLoel, и вход недискажения, VSCLuel.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
