Вы можете использовать musyn команда для разработки робастного контроллера для неопределенного объекта, как описано в Robust Controller Design Using Mu Synthesis. Алгоритм, используемый musyn - итерационный процесс, называемый D-K iteration. В этом процессе функция:
Использует H синтез ∞, чтобы найти контроллер, который минимизирует коэффициент усиления в системе с обратной связью номинальной системы .
Выполняет анализ робастности, чтобы оценить устойчивую H ∞ эффективность системы с обратной связью. Эта величина выражена как масштабированная H ∞ норма с динамическими масштабированиями, называемыми D и G масштабированиями (D шаг).
Находит новый контроллер, чтобы минимизировать масштабированную норму H ∞, полученную на шаге 2 (K шаг).
Повторяет шаги 2 и 3 до тех пор, пока устойчивая эффективность не перестанет улучшаться.
И шаг D, и шаг K являются математически интенсивными расчетами. Далее приводятся подробные данные алгоритма.
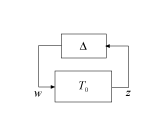
На D шаге, musyn вычисляет верхнюю границу устойчивой производительности H ∞ для токового K контроллера. Шаг D начинается с надежного анализа эффективности для системы с неопределенной системой с обратной связью T = LFT (P, K), как на следующей схеме.

Введение блока производительности в perf преобразует устойчивый анализ T в устойчивый анализ цикла обратной связи на следующей схеме.
Здесь, И является дополненной структурой неопределенности
musyn вычисляет , верхняя граница устойчивой H ∞ эффективность. Для этого ,musyn выбирает сетку частот {ω 1,..., ωN}. Для T только со сложной неопределенностью,musyn вычисляет на каждой частотной ωi
Частотно-зависимые матрицы D, которые коммутируются с, называются D масштабированиями. является самым большим результатом по всем частотам в сетке,
Когда вы используете musyn, вы можете получить доступ к результатам D шага несколькими способами.
Дефолт musyn отображение показывает для каждой итерации в Peak MU столбец.
musyn возвраты для каждой итерации в PeakMU поле info выходной аргумент.
musyn возвращает Di в DG поля info выходной аргумент.
Чтобы визуализировать частотную зависимость Di, установите 'Display' опция musynOptions на 'full'.
Для получения дополнительной информации об расчете и интерпретации , см. Robust Performance Measure for Mu-Synthesis.
musyn подходит для рациональной функции D (s) к последовательности масштабирований {Di}. Подгонка приводит к величине μF называемой scaled H∞ performance,
Поскольку подгонка не точна, μF обычно несколько больше, чем .
Получить доступ к результатам подгонки можно несколькими способами.
Дефолт musyn Отображение показов μF для каждой итерации в DG Fit столбец.
musyn возвращает μF для каждой итерации в PeakMUFit поле info выходной аргумент.
musyn возвращает функции аппроксимации в dr и dc поля info выходной аргумент.
Чтобы визуализировать частотную зависимость функций аппроксимации, установите 'Display' опция musynOptions на 'full'.
T 0 зависит от выбора контроллера K по отношению T 0 = LFT (P 0, K). Поэтому минимизация μF по отношению к K является задачей масштабированного H ∞ синтеза. Таким образом, на K шаге,musyn использование hinfsyn или hinfstruct для вычисления K контроллера* что минимизирует μF. Минимизированная величина является масштабированной H ∞ нормой. Чтобы алгоритм продвинулся вперед, новый контроллер должен улучшить устойчивую эффективность, полученную на D шаге :
В противном случае прогресса недостаточно для компенсации ошибок аппроксимации. Таким образом musyn завершает процесс итерации D-K, когда K* не улучшает устойчивую эффективность в пределах допуска, заданного 'TolPerf' опция musynOptions.
Доступ к результатам шага K можно получить несколькими способами.
Дефолт musyn На отображении показана масштабированная норма H ∞ для каждой итерации в K Step столбец.
musyn возвращает новый контроллер в K от info выходной аргумент и соответствующий масштабированный H ∞ норму для каждой итерации в gamma поле.
Когда у системы есть как реальная, так и комплексная неопределенность, и вы устанавливаете 'MixedMU' опция musynOptions на 'on', musyn использует дополнительное G - измеряющий, чтобы улучшить расчет . Алгоритм в этом случае называется mixed-μ synthesis.
Для смешанной неопределенности, musyn вычисляет и масштабирования Dr (ωi), Dc (ωi) и Gcr (ωi), такие что
на каждой частоте в сетке.
musyn подходит для D и G данных масштабирования путем построения рациональной функции
таким, что
dr (<reservedrangesplaceholder3>), dc (<reservedrangesplaceholder1>), и Ψ (<reservedrangesplaceholder0>) стабильны со стабильной инверсией.
dr (s) и dc (s) аппроксимируют квадратные корни диагональных элементов Dr (ωi) и Dc (ωi).
F приблизительно удовлетворяет
Наконец, масштабированная производительность H ∞ определяется как
где - преобразованная система,
Для точной подгонки D и G, . Поэтому в целом,
Потому что преобразованная система все еще линейная фракционная функция контроллера K, K шаг для смешанного - μ доходы случая, вычисляя контроллер <reservedrangesplaceholder1> <reservedrangesplaceholder0> , который минимизирует.
При использовании musyn, вы можете получить доступ к D и G масштабированиям несколькими способами.
musyn возвращает D и G данные масштабирования в DG поле info выходной аргумент.
musyn возвращает функции аппроксимации в dr, dc, и PSI поля info выходной аргумент.
Чтобы визуализировать частотную зависимость масштабирующих данных и функций аппроксимации, установите 'Display' опция musynOptions на 'full'.
musyn | musynOptions | musynperf
