Метод μ synthesis расширяет методы H синтеза ∞ для разработки устойчивого контроллера для неопределенного объекта. Можно выполнить синтез μ на объектах с неопределенностью параметра, динамической неопределенностью или обоих с помощью musyn команда.
musyn ищет контроллер, который минимизирует надежность H ∞ эффективность системы с обратной связью. Устойчивая производительность H ∞, также называемая μ, количественно определяет, как смоделированная неопределенность влияет на эффективность цикла обратной связи. Для получения дополнительной информации о μ и ее вычислении смотрите Robust Performance Measure for Mu-Synthesis .
Вы можете использовать musyn кому:
Синтезируйте «черный ящик» неструктурированных устойчивых контроллеров.
Робастно настройте контроллер фиксированного или фиксированного порядка, состоящий из настраиваемых компонентов, таких как ПИД-регуляторы, модели пространства состояний и статические усиления.
μ синтез неструктурированных контроллеров аналогичен синтезу контроллера с hinfsyn, за исключением того, что объект включает неопределенность. Как и в случае hinfsyn, вы настраиваете свою проблему как систему обратной связи CL = lft(P,K), где P является объектом и K является проектируемым контроллером.
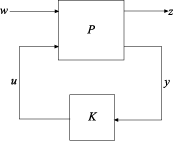
На схеме:
w представляет входы нарушения порядка.
u представляет входы управления.
z представляет выходы ошибки, которые будут сохраняться маленькими.
y представляет выходы измерения, предоставляемые контроллеру.
Вы создаете неопределенное P объекта путем создания модели пространства состояний с неопределенными коэффициентами (ureal или ucomplex) блоки, неопределенная динамика (ultidyn блоки), или и то, и другое. Создайте объект таким образом, чтобы выходные параметры измерения y были последними выходами, а входные параметры управления u были последними входами. Как и в случае hinfsynможно опционально увеличить входные и выходные входы объекта управления с помощью функций взвешивания (фильтры формирования контура), которые представляют цели управления.
Затем вы передаете этот объект musyn, который ищет K контроллера, которая минимизирует устойчивую H ∞ эффективность. Контроллер возвращается как модель пространства состояний. Для простого примера смотрите Неструктурированный Синтез Робастного Контроллера на musyn страница с описанием.
Вместо получения контроллера, который является моделью пространства состояний свободной формы, можно задать фиксированную структуру контроллера с настраиваемыми параметрами. musyn затем настраивает эти параметры, чтобы минимизировать устойчивость H ∞ эффективность системы. μ синтез контроллеров с фиксированной структурой аналогичен настройке контроллера сhinfstruct, за исключением того, что объект включает неопределенность.
Чтобы настроить свою задачу для синтеза μ с фиксированной структурой, вы создадите обобщенное пространство состояний (genss) модель неопределенной системы с обратной связью с настраиваемыми элементами контроллера. Для этого вы создаете и соединяете:
Числовые модели LTI, представляющие фиксированные компоненты системы управления
Неопределенные блоки системы управления, такие как ureal и ultidyn блоки, представляющие неопределенные компоненты объекта
Дополнительные функции взвешивания LTI (фильтры формирования цикла), которые представляют цели управления
Настраиваемые блоки системы управления, такие как tunablePID, tunableSS, и tunableGain представлять настраиваемые компоненты системы
Для примера, который показывает, как создать такую модель, см., Создают Настраиваемые Системные модели управления С Неопределенными Параметрами.
Вы передаете настраиваемую, неопределенную модель замкнутой системы musyn, который ищет значения настраиваемых параметров, которые оптимизируют устойчивую H ∞ эффективность от входов модели до ее выходов. Для простого примера см. Робастную настройку контроллера с фиксированной структурой на musyn страница с описанием.
Если у вас есть Simulink® модель вашей системы управления, вы можете использовать slTuner для линеаризации модели с заданными неопределенными параметрами и настраиваемыми блоками. Затем вы используете getIOTransfer для извлечения genss модель для проектирования контроллера с musyn. Для получения примера смотрите Модель Неопределенности в Simulink для Робастной Настройки.
musyn возвращает устойчивый контроллер K (для неструктурированной настройки контроллера) или настроенной версии системы управления CL (для настройки контроллера с фиксированной структурой). Это также возвращает лучшее достигнутое устойчивое H ∞ эффективность как CLperf выходной аргумент. Это значение говорит вам, что с контроллером, возвращенным musynпиковое усиление системы с обратной связью остается ниже CLperf для неопределенности до 1/ CLperf в нормированных модулях. Для примера:
CLperf = 0,5 означает, что коэффициент усиления в системе с обратной связью остается ниже 0,5 для неопределенности до удвоенного значения неопределенности, заданной в входной модели. Наихудший коэффициент усиления для заданной неопределенности обычно меньше.
CLperf = 2 означает, что коэффициент усиления в системе с обратной связью остается ниже 2 для неопределенности до половины неопределенности, указанной в CL. Для этого значения усиление в худшем случае для полной заданной неопределенности может быть намного больше. Он может быть даже бесконечным, что означает, что система не остается стабильной во всей области значений заданной неопределенности.
Для получения дополнительной информации об этом количестве и способе его вычисления смотрите Robust Performance Measure for Mu-Synthesis.
Как найти K, musyn использует итерационный процесс, называемый D-K iteration. Этот процесс решает последовательность масштабированных H ∞ задач. Частотно-зависимые масштабирования, называемые D и G масштабами, используют структуру неопределенности. Для выполнения итерации D-K ,musyn:
Использует H синтез ∞, чтобы найти контроллер, который минимизирует коэффициент усиления в системе с обратной связью номинальной системы .
Выполняет анализ робастности, чтобы оценить устойчивую H ∞ эффективность системы с обратной связью. Эта величина выражается как масштабированная H ∞ норма с D и G масштабированиями (D шаг).
Находит новый контроллер, чтобы минимизировать H ∞ норму, полученную на шаге 2 (K шаге).
Повторяет шаги 2 и 3 до тех пор, пока устойчивая эффективность не перестанет улучшаться.
Для получения математических подробностей о том, как этот алгоритм работает, смотрите Процесс итерации D-K.
musyn предоставляет вам два способа мониторинга и интерпретации прогресса алгоритма: дисплей по умолчанию и полное отображение.
musyn ОтображениеПо умолчанию, musyn обеспечивает краткое отображение прогресса алгоритма в MATLAB® командное окно. Для образца:
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 100 5.747 6.394 10 4
2 5.221 3.433 4.607 10 6
3 2.682 2.263 2.627 10 4
4 1.987 1.687 2.18 10 6
5 1.287 1.192 1.377 10 8
6 1.079 1.087 1.09 10 8
7 1.076 1.046 1.055 8 6
8 1.049 1.024 1.044 10 6
9 1.045 1.022 1.039 8 6
10 1.04 1.023 1.033 8 6
Best achieved robust performance: 1.02
Отображение включает информацию о каждой итерации D-K.
K Step столбец - Для первой итерации это значение является H ∞ эффективностью номинальной системы с обратной связью после синтеза контроллера. Для остальных итераций в этом столбце показана масштабированная норма H ∞ после синтеза контроллера.
Peak MU столбец - Робастная эффективность (, верхняя граница μ) для контроллера, разработанного в K Step.
DG fit столбец - Масштабированные H ∞ эффективность после подбора кривой D и G масштабирований с рациональными функциями.
Fit order столбцы - Порядки рациональной функции, используемой для соответствия масштабированиям в этой итерации. Если система имеет только сложную неопределенность, или когда 'MixedMU' опция musynOptions установлено в 'off', затем musyn не применяет G масштабирование. В этом случае указан только D порядок подгонки.
Если вы видите большое различие между Peak MU и DG Fit значений в заданной итерации, это знак, что musyn не может найти хорошую подгонку для масштабирования. В этом случае можно попробовать увеличить максимальный порядок подгонки с помощью 'FitOrder' опция musynOptions.
Для других способов улучшить результаты, смотрите Улучшение Результатов Mu-Synthesis.
musyn ОтображениеМожно получить более подробное представление о прогрессе итерации D-K путем установки 'Display' опция musynOptions на 'full'. Если включить полное отображение, то musyn паузы после каждой итерации D-K, чтобы можно было просмотреть подробные результаты итерации. В сложение к информации, описанной в Default musyn Отображения, полное отображение:
Показывает подробную информацию о расчетах для синтеза контроллером (K шаг) текущей итерации. Для неструктурированных контроллеров см. hinfsyn для получения информации об этом отображении. Для контроллеров с фиксированной структурой см. hinfstructOptions.
Отображает информацию о подгонках для масштабирования D и G масштабах (если таковые имеются) текущей итерации. Информация включает в себя порядок соответствия масштабирований для каждого неопределенного блока. Это также включает счет качества подгонки. Счет, меньше чем или равная 1, указывает на достаточную пригодность для синтеза μ.
Генерирует графики, которые позволяют вам визуализировать D и G модели, устойчивую эффективность перед подбором кривой и масштабированную H ∞ эффективность после подбора кривой. Изучение этих графиков может помочь вам определить, является ли максимальный порядок подгонки достаточно высоким, чтобы захватить все частотно-зависимые изменения в масштабированиях (см. FitOrder опция musynOptions для получения дополнительной информации.
The D Fit или D,G Fit график показывает данные масштабирования и соответствующие рациональные подгонки.
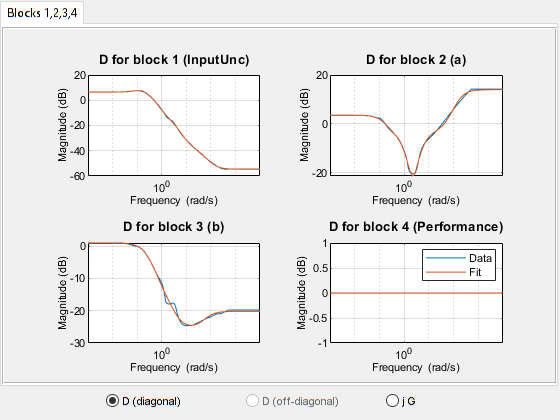
Используйте переключатели, чтобы выбрать, какие масштабирования необходимо проверить:
D (diagonal) показывает величину диагональных элементов D масштабирования.
D (offdiagonal) показывает величину и фазу недиагональных элементов D масштабирования. Этот график доступен, когда ваша система имеет повторяющиеся неопределенные блоки. (См. 'FullDG' опция musynOptions для получения дополнительной информации
jG показывает величину и фазу G -масштабирований. G масштабирований присутствуют только, когда существует реальная неопределенность и MixedMU опция musynOptions является 'on'. См. «Улучшение результатов Mu-Synthesis».
The Robust Performance график показывает эффективность системы с обратной связью до и после подбора кривой.
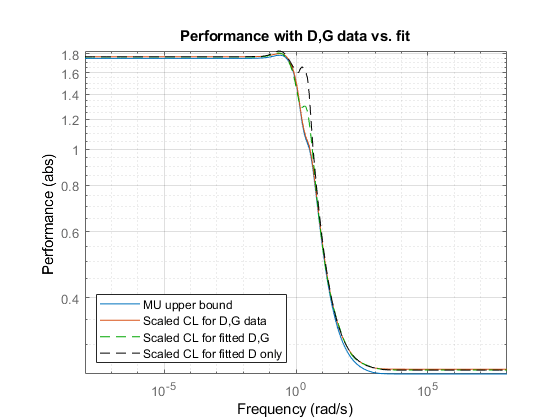
Следы на этом графике:
Mu upper bound - Устойчивая эффективность, верхняя граница как функция частоты
Scaled CL for D,G data - Масштабирование H ∞ эффективность перед подгонкой D и G данных масштабирования с рациональными функциями
Scaled CL for fitted D,G - Масштабированные H ∞ эффективность после подбора кривой
Scaled CL for fitted D only - Показывает, какое поведение не будет захвачено, если G будут опущены
Для получения подробной информации об алгоритме итерации D-K и значении всех величин в полном отображении, смотрите Процесс итерации D-K.
