Во время инициализации модели Simulink соединяется с мастером ROS, а также создает узел, сопоставленный с моделью. Основные URI ROS и Узел указаны в диалоговом окне «Configure ROS Network Addresses» (Настройка сетевых адресов ROS). Вы можете получить доступ к этому на вкладке Simulation, выбрав ROS Toolbox > ROS Network.
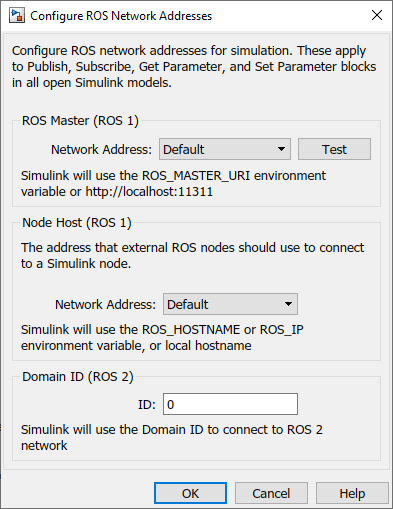
Параметр Network Address может быть установлен на Default или Custom.
Для главного URI ROS, если Network Address задано значение Default, Simulink® использует следующие правила, чтобы задать основной URI ROS:
Использование ROS_MASTER_URI переменная окружения, если она задана.
Если MATLAB® глобальный узел ROS существует, используйте главный URI, сопоставленный с глобальным узлом. Глобальный узел создается автоматически при rosinit вызывается.
Используйте адресные http://localhost:11311 если два других правила не применяются.
Для узла, если Network Address задано значение DefaultSimulink использует следующие правила для установки узла ROS Host:
Использование ROS_HOSTNAME переменная окружения, если она задана.
Использование ROS_IP переменная окружения, если она задана.
Используйте имя хоста или IP-адрес первого сетевого интерфейса в системе при наличии.
Используйте адресные http://localhost:11311 если другие правила не применяются.
Для обоих это те же правила, которые MATLAB использует для разрешения своих сетевых адресов ROS.
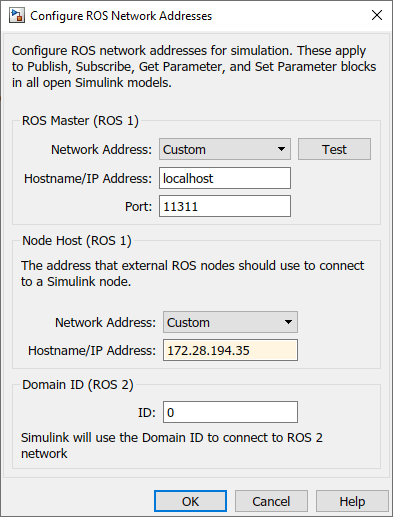
В противном случае, если вы выбрали Customможно задать все переменные как показано ниже. Это переопределяет переменные окружения.
Примечание. Эти адреса сохраняются в настройках MATLAB, а не в модели. Поэтому эта информация разделяется между всеми моделями Simulink и несколькими установками MATLAB одного релиза.
Можно также использовать кнопку Test для подключения к главному блоку ROS. Если вы получите ошибку, позвоните rosinit чтобы настроить локальную сеть ROS или указать удаленный мастер ROS, проверьте правильность настроек.
Пользовательские основные параметры ROS или узловые настройки хоста не используются в сгенерированном коде при развертывании автономного узла.
