Чтобы импортировать модели из инструментов CAD, преобразуйте модель сборки продукта в формат X3D, используемый Simulink® 3D Animation™ программное обеспечение. Большинство инструментов CAD имеют X3D фильтров экспорта. Если фильтр экспорта недоступен непосредственно в инструменте CAD, можно использовать утилиты преобразования, доступные от третьих лиц.
При экспорте моделей CAD в формат X3D можно задать несколько опций для настройки выхода. Можно задать опции, специфичные для фильтров экспорта или являющиеся общими свойствами файла CAD. Подробные сведения о том, как задать эти свойства, см. в документации CAD-системы. Некоторые из наиболее типичных и полезных свойств файла CAD:
Уровень детализации Факторов
Модули, используемые в экспортированных файлах
Используемая система координат
Иерархия сборок
Обычно модели CAD являются параметрическими моделями, которые используют собственные методы визуализации объектов для обработки различных контекстов. Во время экспорта модели внутренняя параметрическая модель сборки тесселируется. В этом процессе поверхность модели разделяется на треугольные сетки, представленные IndexedFaceSet узлы. Перед тесселированием установите зернистость mesh так, чтобы она подходила для дальнейшего использования. Изменение счетчика многоугольников позже нецелесообразно. Независимая от разрешения информация о форме и структуре объекта теряется и не может быть восстановлена на основе тесселированной модели.
Для эффективного рендеринга движущихся частей держите модели виртуального мира как можно более простыми, с минимальным ухудшением видимости модели. Найдите подходящий компромисс между этими двумя требованиями.
Компьютеры и графические ускорители имеют область значений уровней эффективности, поэтому нет твердой рекомендации по количеству подходящих для использования многоугольников или треугольников. Чтобы оценить сложность модели, можно отобразить получившийся файл 3D виртуального мира в Simulink 3D Animation viewer и наблюдать реакцию средства просмотра на навигацию. Если вы можете перемещаться по виртуальному миру без каких-либо существенных задержек, модель подходит для дальнейшей работы. Если вы соединяете виртуальный мир с моделью Simulink, у вас есть доступ к более точным показателям пригодности. Для примера можно найти количество систем координат, отображаемых в секунду во время симуляции.
X3D длины модулей в метрах. Чтобы правильно масштабировать экспортированные детали в виртуальном мире, экспортируйте детали с помощью счетчиков. Если экспортированные объекты являются маленькими или большими, рассмотрите создание вашего виртуального мира в какой-либо другой шкале. В этом случае экспортируйте объекты, используя модули измерения.
Средства просмотра виртуальной реальности измеряют с помощью размерностей, сопоставимых с размерностями людей, для достижения эффекта погружения виртуальной реальности. Средства просмотра предполагают, что вы подготовили сцену, чтобы ее мог пройти или осмотреть виртуальный посетитель сцены (аватар). Физические размерности аватара используются в вычислениях в таких целях, как обнаружение столкновения, близлежащие усечения или следование за местностью. Чтобы настроить размерности аватара и другие специфичные для навигации параметры, такие как скорость навигации по умолчанию), используйте NavigationInfo узел. Simulink 3D Animation viewer позволяет эффективно перемещаться в виртуальном мире, включая масштабированные сцены. Например, можно использовать средство просмотра для просмотра миниатюрных объектов или для визуализации крупномасштабной операции самолета в пространстве.
X3D использует Декартову систему координат с осями, заданными так, чтобы:
+ x точки справа
+ y точки вверх
+ z точки вне экрана
Чтобы избежать преобразования осей объектов в систему виртуального мира позже, по возможности экспортируйте модели CAD с помощью идентичной системы координат. Если инструмент CAD использует другую систему координат и не позволяет изменять ее для экспортируемых объектов, обратите внимание на системные различия. Затем реализуйте преобразования осей в вашей модели позже.
Например, если вы экспортируете модель транспортного средства так, чтобы она указывала в сторону оси + x на дороге в виртуальном мире:
Сделать дорогу также указывает в направлении + x.
Используйте координату x для модели динамики аппарата.
Запишите ориентацию деталей в системе координат.
Когда инструмент CAD позволяет вам анимировать детали и сборки, сбросьте их положения в начальное состояние перед экспортом.
Экспорт сборки деталей варьируется в зависимости от структуры модели, которая обычно происходит в двух формах:
Все детали являются независимыми друг от друга, или объекты в сцене являются независимыми друг от друга на одном уровне иерархии сцен. Экспортированный файл 3D виртуального мира имеет плоскую структуру со всеми координатами детали, заданными в глобальных координатах.
Детали следуют иерархии, заданной в инструменте CAD. Экспортированный файл 3D виртуального мира использует эту иерархию через Transform-children механизм, для создания вложенной структуры. В этом случае обычно координаты детали задаются в локальной системе координат родительского элемента детали.
Для примера можно экспортировать робота со следующей иерархией объектов. Координаты каждой детали определяются в локальной системе координат родительского элемента:
вращающаяся поддержка - рука - запястье - рука - инструмент
Когда вращающаяся поддержка перемещается, все другие детали предназначены для перемещения вместе с ней.
Иерархия файла 3D виртуального мира должна соответствовать координатам, используемым в динамической модели сборки следующим образом:
Если все части модели Simulink или Simscape™ Multibody™ заданы в глобальных координатах, используйте структуру плоского виртуального мира.
Если все части модели Simulink или Simscape Multibody следуют иерархическим отношениям, используйте вложенную структуру виртуального мира.
Чтобы проиллюстрировать эти два случая, представьте себе вращающийся маятник. Когда серый рычаг вращается вокруг вертикальной оси, оранжевый маятник качается вокруг оси z в локальных координатах вращающегося серого рычага.
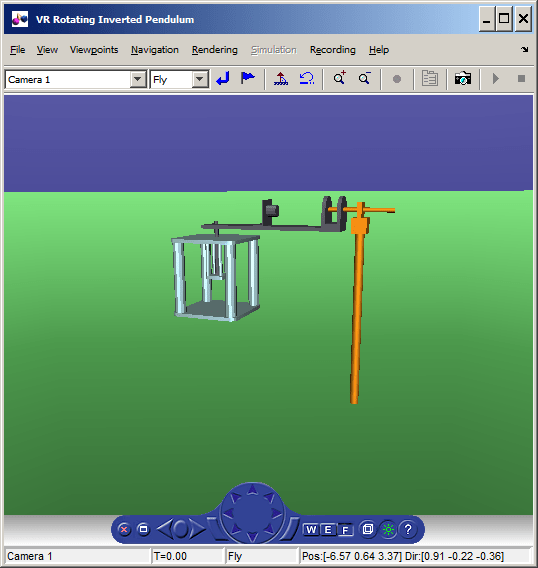
Если модель динамики маятника использует глобальные координаты для всех движущихся частей, модель виртуального мира имеет плоскую структуру.
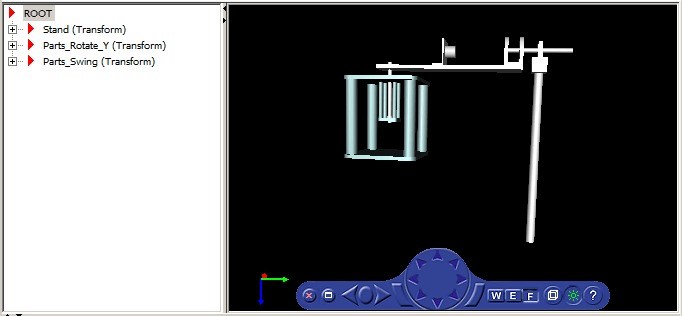
Вот код для плоской структуры.
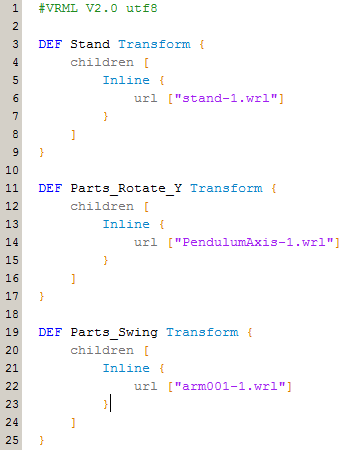
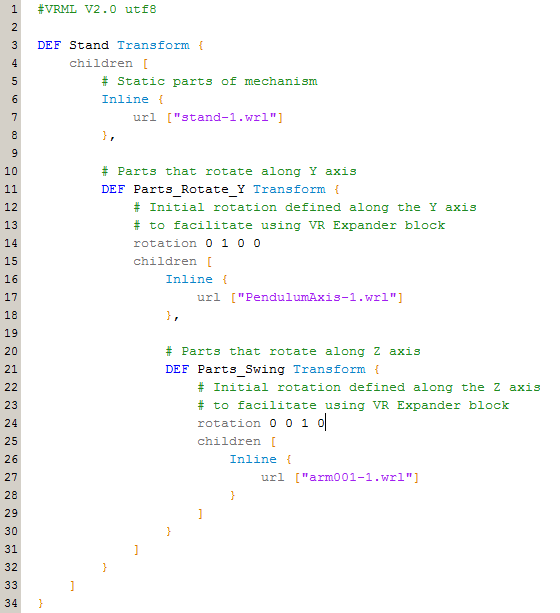
Если модель динамики маятника использует локальные координаты для движущихся деталей, соответствующая модель виртуального мира имеет вложенную структуру.
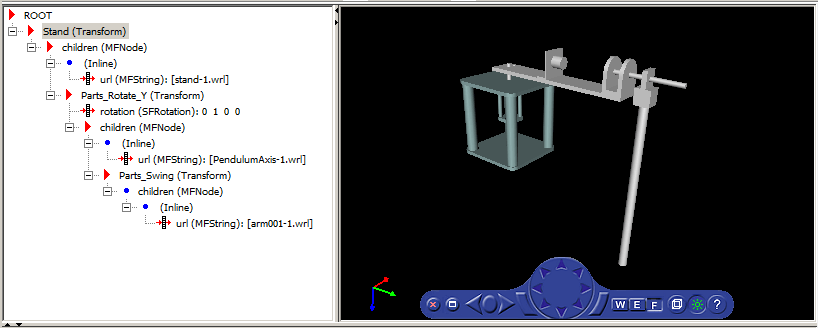
Вот код для вложенной структуры.
Некоторые сторонние программы позволяют экспортировать каждую часть сборки в отдельные файлы 3D виртуального мира. Затем все детали упоминаются в одном главном файле с помощью Inline механизм. Ссылка таким образом является рекомендуемым способом работы со сборками, поскольку основной файл является маленьким и легко понимаемым и изменяемым.
