Используя Control System Designer, можно настроить компенсаторы с помощью различных графических и автоматизированных методов настройки.
Используйте методы графической настройки, чтобы в интерактивном режиме добавить, изменить и удалить полюса контроллера, нули и усиления.
| Метод настройки | Описание | Полезно для |
|---|---|---|
| Bode Editor | Настройте компенсатор, чтобы получить определенную частотную характеристику без разомкнутого контура (формирование цикла). | Настройка полосы пропускания без разомкнутого контура и разработка спецификаций по запасу по амплитуде и фазе. |
| Closed-Loop Bode Editor | Настройте предфильтр, чтобы улучшить отклик системы с обратной связью. | Улучшение отслеживания уставки, входа подавления помех и отторжения шума. |
| Root Locus Editor | Настройте компенсатор, чтобы создать положения шеста с обратной связью, которые удовлетворяют вашим проектом спецификациям. | Разработка спецификаций для проекта во временной области, таких как максимальное перерегулирование и время урегулирования. |
| Nichols Editor | Настройте компенсатор, чтобы достичь определенного отклика без разомкнутого контура (формирование цикла), объединяя информацию о усилении и фазе на графике Николса. | Настройка полосы пропускания без разомкнутого контура и разработка спецификаций по запасу по амплитуде и фазе. |
При использовании графической настройки можно модифицировать компенсатор либо непосредственно из графиков редактора, либо с помощью редактора компенсаторов. Распространенный подход к проекту состоит в том, чтобы грубо настроить компенсатор с помощью графиков редактора, а затем использовать редактор компенсатора, чтобы точно настроить параметры компенсатора. Для получения дополнительной информации см. Раздел «Редактирование динамики компенсатора»
Методы графической настройки не являются взаимоисключающими. Например, можно настроить компенсатор, используя одновременно как редактор Bode, так и редактор корневого годографа. Эта опция полезна при разработке спецификаций как во временной, так и в частотной областях.
Для примеров графической настройки смотрите следующее:
Используйте автоматические методы настройки, чтобы автоматически настроить компенсаторы на основе ваших проектов спецификаций.
| Метод настройки | Описание | Требования и ограничения |
|---|---|---|
| PID Tuning |
Автоматическая настройка коэффициентов ПИД для балансировки эффективности и робастности или настройка контроллеров с помощью классических формул настройки ПИД. |
Классические формулы настройки ПИД требуют стабильного или интегрирующего эффективного объекта. |
| Optimization Based Tuning |
Оптимизируйте параметры компенсатора проекта используя требования, заданные в графической настройке и графиках для анализа. |
Требует Simulink® Проектируйте Optimization™ программное обеспечение. Настройка параметров ранее определенной структуры контроллера. |
| LQG Synthesis |
Спроектируйте стабилизирующий контроллер обратной связи полного порядка как линейно-квадратично-гауссов (LQG) трекер. |
Максимальный порядок контроллера зависит от эффективной динамики объекта. |
| Loop Shaping |
Найдите стабилизирующий контроллер обратной связи полного порядка с заданной пропускной способностью или формой разомкнутого контура. |
Требуется программное обеспечение Robust Control Toolbox™. Максимальный порядок контроллера зависит от эффективной динамики объекта. |
| Internal Model Control (IMC) Tuning |
Получите контроллер стабилизирующей обратной связи полного порядка с помощью метода IMC проекта. |
Принимает, что ваша система управления использует архитектуру IMC, которая содержит прогнозирующую модель динамики вашего объекта. Максимальный порядок контроллера зависит от эффективной динамики объекта. |
Общий подход к проекту состоит в том, чтобы сгенерировать начальный компенсатор с помощью настройки ПИД, синтеза LQG, формирования цикла или настройки IMC. Затем можно улучшить эффективность компенсатора, используя настройку на основе оптимизации или графическую настройку.
Для получения дополнительной информации об автоматических методах настройки смотрите Проект Компенсатор с использованием автоматических методов настройки.
Эффективным объектом является система, управляемая компенсатором, которая содержит все элементы разомкнутого контура в вашей модели, кроме компенсатора, который вы настраиваете. Следующие схемы показывают примеры эффективных объектов:
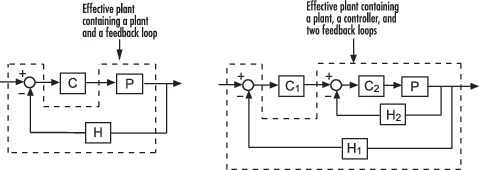
Знание свойств эффективного объекта, увиденного вашим компенсатором, может помочь вам понять, какие методы настройки работают для вашей системы. Для примера некоторые автоматизированные методы настройки применяются только к компенсаторам, разомкнутые контуры которых () имеют стабильные эффективные объекты (). Кроме того, для методов настройки, таких как IMC и формирование цикла, максимальный порядок контроллера зависит от динамики эффективного объекта.
Если компенсатор в вашей модели Simulink имеет ограничения на его полюсы, нули или усиление, вы не можете использовать синтез LQG, формирование цикла или настройку IMC. Например, вы не можете настроить параметры блока PID Controller с помощью этих методов. Если вашему приложению требуются ограничения контроллера, используйте альтернативный метод автоматической или графической настройки.
Кроме того, любые ограничения компенсатора в модели Simulink ограничивают структуру настроенного компенсатора. Для примера, если вы используете настройку ПИД и конфигурируете блок PID Controller как ПИ-контроллер, настроенный компенсатор должен иметь нуль параметр производной.
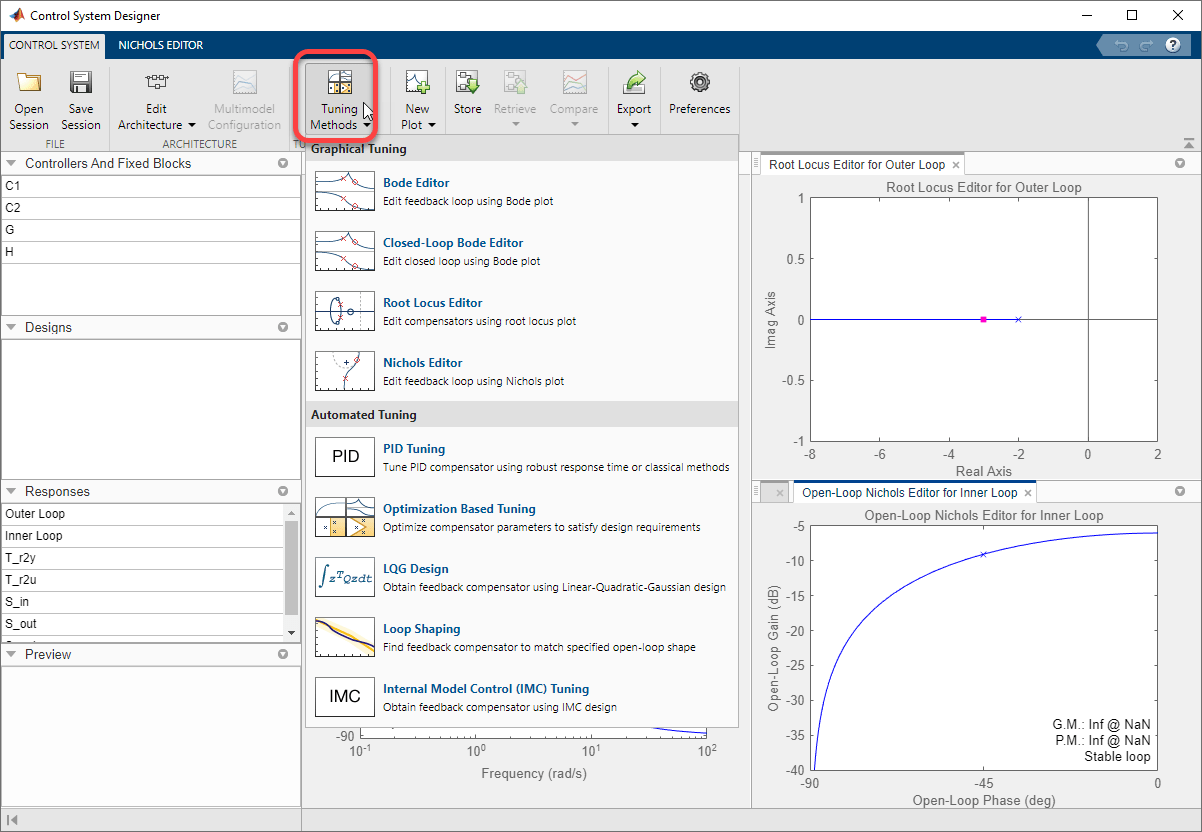
Чтобы выбрать метод настройки, Control System Designer щелкните Tuning Methods.