Этот пример показывает, как спроектировать компенсатор для Simulink® модель с использованием автоматической настройки ПИД в приложении Control System Designer. Затем показано, как тонко настроить проект компенсатора с помощью редактора разомкнутый контур.
Этот пример использует watertank_comp_design Модель Simulink. Чтобы открыть модель, в MATLAB® в командной строке введите:
watertank_comp_design
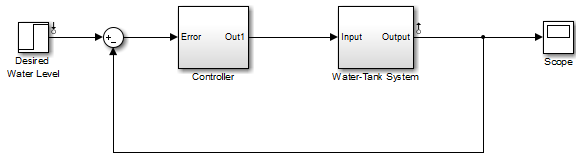
Эта модель содержит Water-Tank System модель объекта управления и ПИД-регулятора в системе обратной связи с одним циклом.
Чтобы просмотреть модель бака с водой, откройте подсистему Water-Tank System.
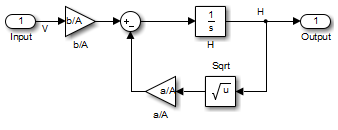
Эта модель представляет следующую баку с водой систему.
Здесь:
H - высота воды в баке.
Vol - объем воды в баке.
V - напряжение, приложенное к насосу.
A - площадь поперечного сечения бака.
b является константой, связанной со скоростью потока жидкости в бак.
a является константой, связанной со скоростью потока жидкости из бака.
Вода входит в бак из верхней части со скоростью, пропорциональной напряжению, приложенному к насосу. Вода уходит через отверстие в основе бака со скоростью, пропорциональной квадратному корню уровня воды в баке. Присутствие квадратного корня в скорости потока жидкости воды приводит к нелинейному объекту. Исходя из этих скоростей потока жидкости, скорость изменения объема бака составляет:
Настройте ПИД-регулятор так, чтобы он соответствовал следующим требованиям проект переходной характеристики с обратной связью:
Перерегулирование менее 5%
Время нарастания менее пяти секунд
Чтобы открыть Control System Designer, в окне модели Simulink, в галерее Apps, нажмите Control System Designer.
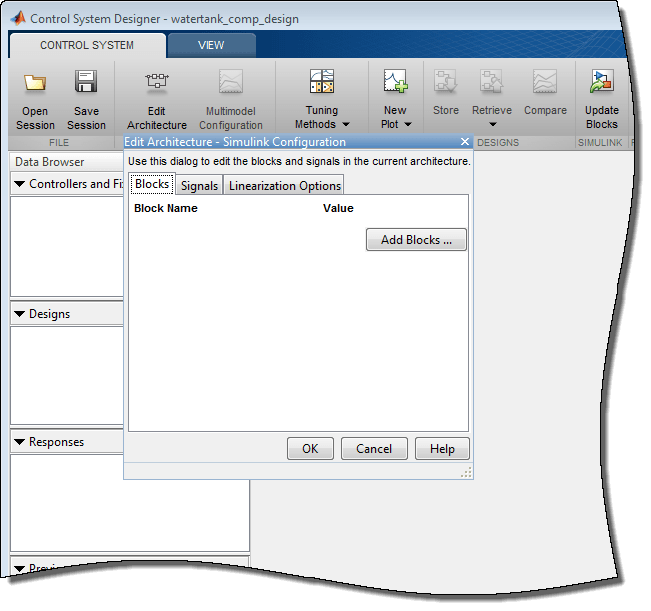
Control System Designer откроется и автоматически откроет диалоговое окно Править архитектуру (Edit Architecture).
Чтобы задать компенсатор для настройки, в диалоговом окне «Редактирование архитектуры» нажмите кнопку Add Blocks.
В диалоговом окне «Выбор блоков для настройки» на левой панели щелкните подсистему Controller. В столбце Tune установите флажок для PID Controller.
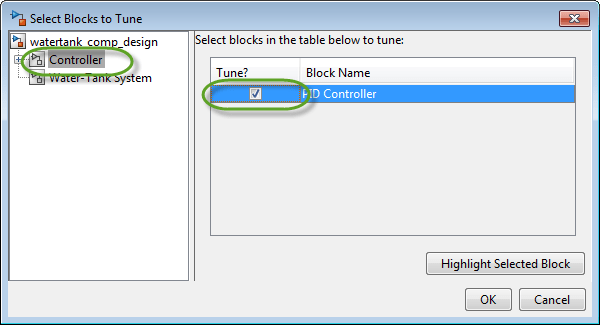
Нажмите OK.
В диалоговом окне Edit Architecture приложение добавляет выбранный блок контроллера в список блоков для настройки на вкладке Blocks. На вкладке Signals приложение также добавляет выход блока PID Controller в список Locations точек анализа.
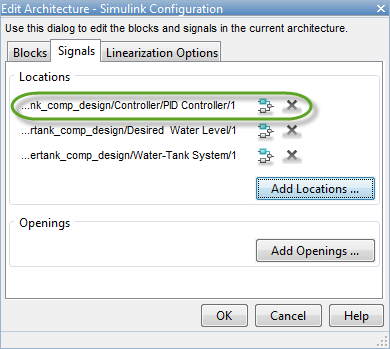
Когда Control System Designer откроется, он добавляет все точки анализа, ранее определенные в модели Simulink, в список Locations. Для watertank_comp_design, существует два таких сигнала.
Desired Water Level блок выхода - Опорный сигнал для системы с обратной связью переходной характеристики
Water-Tank System блок выхода - Выход сигнал для системы с обратной связью переходной характеристики
Чтобы линеаризировать модель Simulink и задать архитектуру управления, нажмите OK.
По умолчанию Control System Designer линеаризирует модель объекта управления в начальных условиях модели.
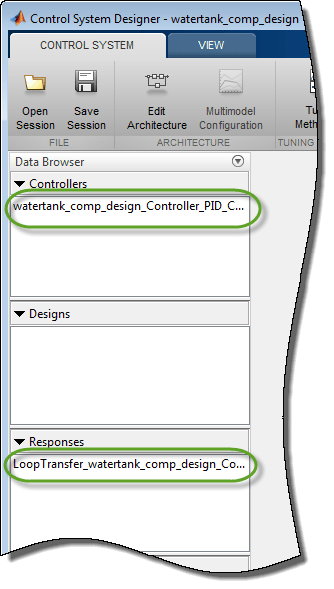
Приложение добавляет ПИД-регулятора в Data Browser, в разделе Controllers and Fixed Blocks. Приложение также вычисляет передаточную функцию без разомкнутого контура на выходе блока PID Controller и добавляет этот ответ к Data Browser.
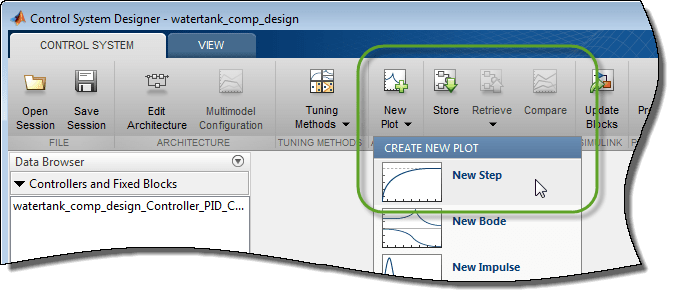
Чтобы проанализировать проектирование контроллера, создайте передаточную функцию системы с обратной связью и постройте график ее переходной характеристики.
На вкладке Control System нажмите New Plot и выберите New Step.
В диалоговом окне New Step to plot, в раскрывающемся списке Select Response to Plot, выберите New Input-Output Transfer Response.
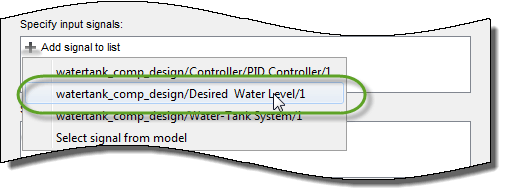
Чтобы добавить входной сигнал, в области Specify input signals нажмите +. В раскрывающемся списке выберите выход блока Desired Water Level.
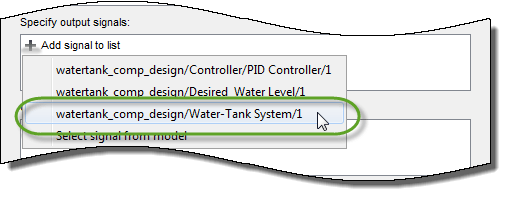
Чтобы добавить сигнал выхода, в области Specify output signals нажмите +. В раскрывающемся списке выберите выход блока Water-Tank System.
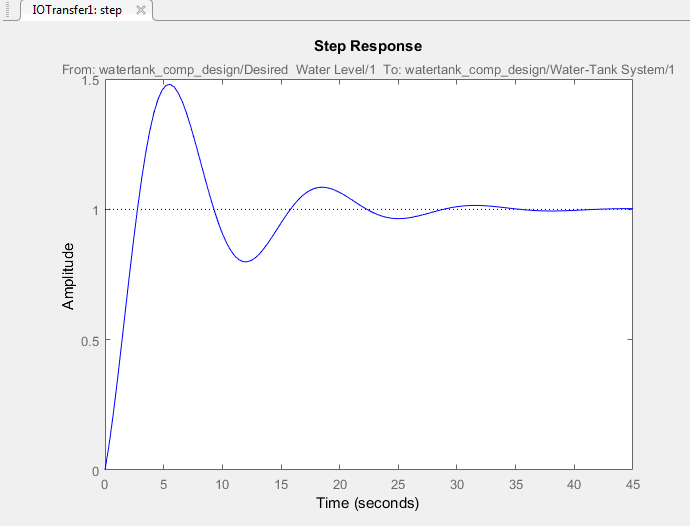
Чтобы создать передаточную функцию с обратной связью и построить график переходной характеристики, нажмите Plot.
Чтобы просмотреть максимальное перерегулирование на графике отклика, щелкните правой кнопкой мыши область графика и выберите Characteristics > Peak Response.
Чтобы просмотреть время нарастания на графике отклика, щелкните правой кнопкой мыши область графика и выберите Characteristics > Rise Time.
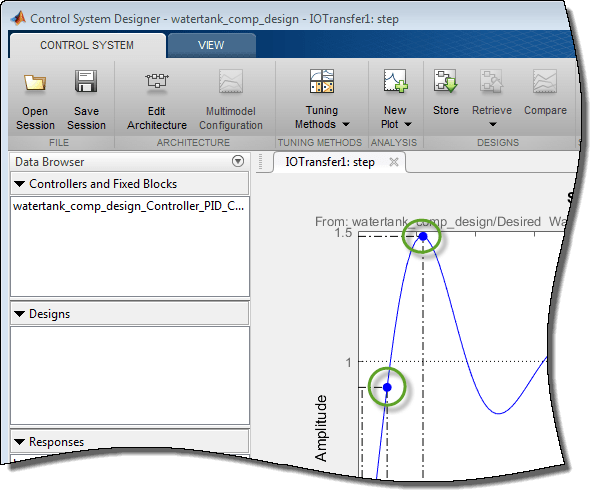
Наведите указатели на характеристики, чтобы просмотреть их значения. Текущий проект имеет:
Максимальное перерегулирование 47,9%.
Время нарастания 2.13 секунд.
Этот ответ не удовлетворяет 5% требования к проектированию перерегулирования.
Чтобы настроить компенсатор с помощью автоматической настройки ПИД, нажмите Tuning Methods и выберите PID Tuning.
В диалоговом окне «Настройка ПИД», в разделе Specifications, выберите следующие опции:
Tuning method — Robust response time
Controller Type — PI
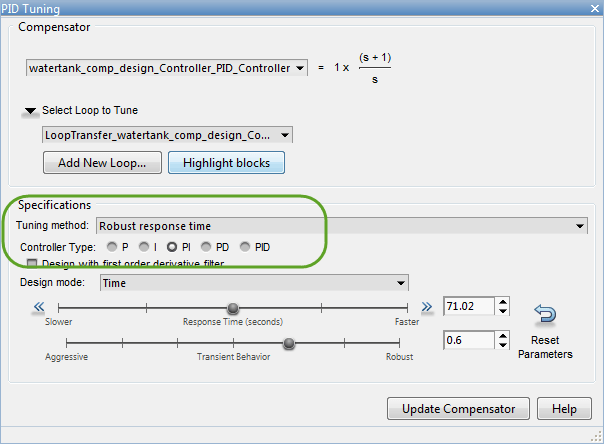
Нажмите Update Compensator. Приложение обновляет ответ с обратной связью для новых настроек компенсатора и обновляет переходный процесс.
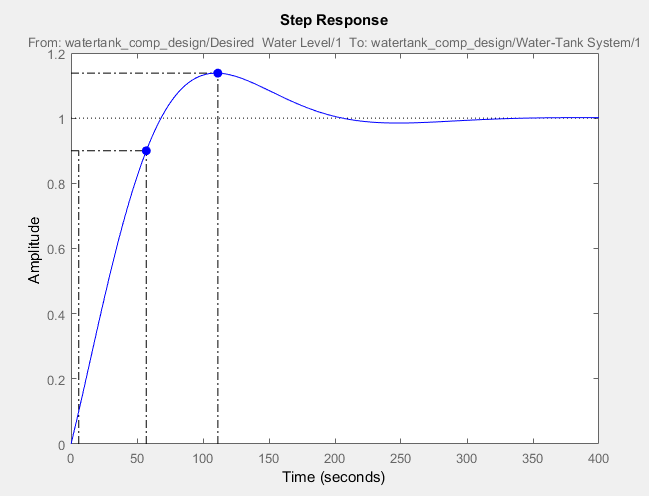
Чтобы проверить производительность системы, наведите указатель мыши на маркеры характеристик отклика. У отклика системы с настроенным компенсатором:
Максимальное перерегулирование 13,8%.
Время нарастания 51,2 секунд.
Этот ответ превышает максимально допустимое перерегулирование 5%. Время нарастания намного медленнее, чем необходимое время нарастания пять секунд.
Чтобы уменьшить время нарастания, в интерактивном режиме увеличьте коэффициент усиления компенсатора с помощью графического Bode Tuning.
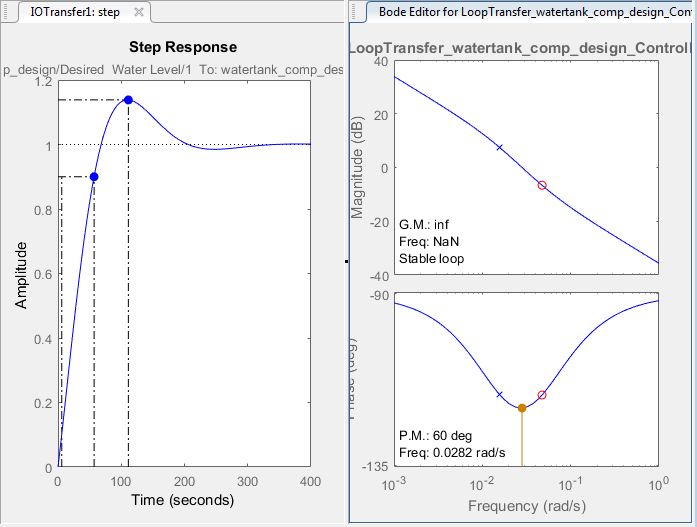
Чтобы открыть редактор Bode без разомкнутого контура, нажмите Tuning Methods и выберите Bode Editor.
В диалоговом окне Select Response to Edit уже выбран ответ без разомкнутого контура на выходе блока PID Controller. Чтобы открыть редактор Bode для этого ответа, нажмите Plot.
Чтобы просмотреть Bode Editor и Step Response графики один за другим, на вкладке View, нажмите Left/Right.
На Bode Editor графике перетащите величину ответ вверх, чтобы увеличить коэффициент усиления компенсатора. Увеличивая коэффициент усиления, вы увеличиваете пропускную способность и ускоряете ответ.
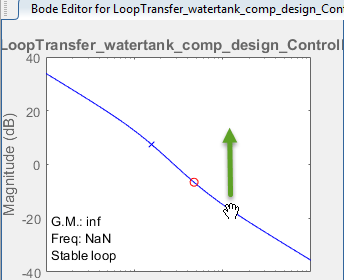
Когда вы перетаскиваете ответ Bode вверх, приложение автоматически обновляет компенсатор и соответствующие графики отклика. Кроме того, когда вы отпускаете график, в строке состояния, с правой стороны, приложение отображает обновленное значение усиления.
Увеличьте коэффициент усиления компенсатора до тех пор, пока переходная характеристика не будет соответствовать требованиям проекта. Одним из потенциальных решений является установка коэффициента усиления на 1.7.
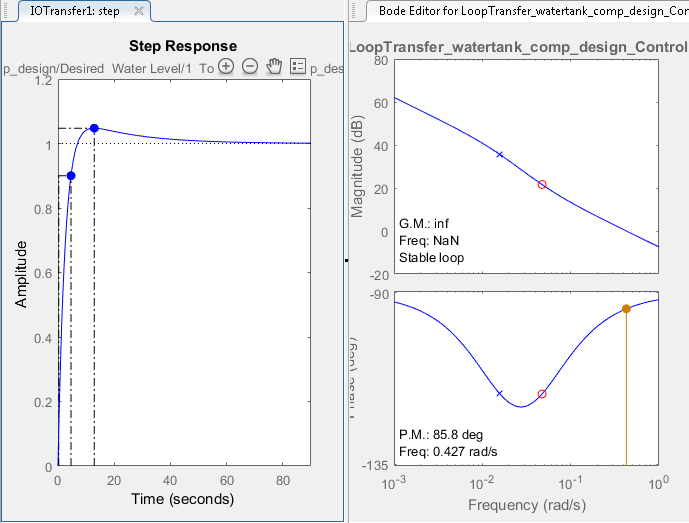
При этом значении усиления реакция замкнутого цикла имеет:
Максимальное перерегулирование 4,74%.
Время нарастания 4,36 секунд.
Чтобы настроить параметры вашего компенсатора непосредственно, используйте редактор компенсаторов. В Bode Editor щелкните правой кнопкой мыши область графика и выберите Edit Compensator.
В диалоговом окне Редактор компенсатора на вкладке Parameter настройте коэффициент усиления ПИД-регулятора. Для получения дополнительной информации о редактировании параметров компенсатора см. Раздел «Настройка блоков Simulink с использованием редактора компенсаторов».
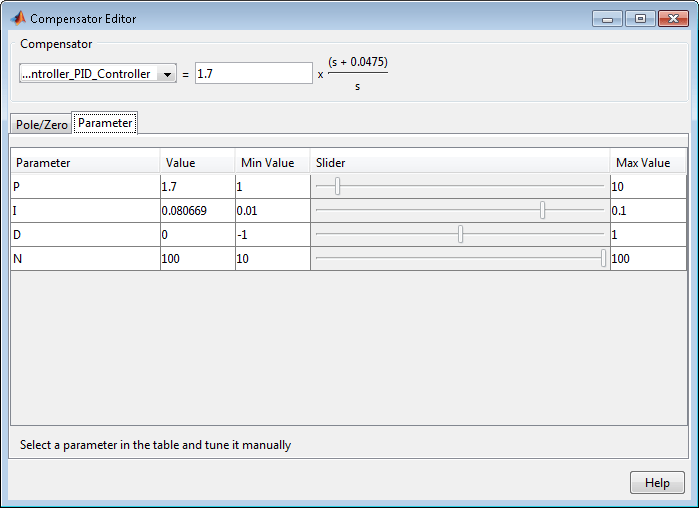
В то время как настроенный компенсатор соответствует проект требованиям, время урегулирования превышает 30 секунд. Чтобы улучшить время урегулирования, отрегулируйте P и I параметры контроллера вручную.
Для примера установите параметры компенсатора:
P = 4
I = 0.1
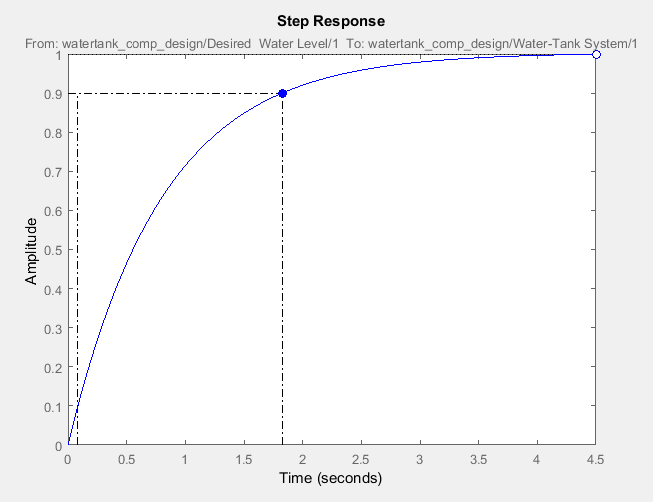
Этот компенсатор выдает ответ с обратной связью с:
Максимальное перерегулирование 0,206%.
Время нарастания 1,74 секунд.
Время урегулирования около трех секунд.
Проверьте проект компенсатора путем симуляции нелинейной модели Simulink с параметрами настроенного контроллера.
Чтобы записать настроенные параметры компенсатора в блок PID Controller, в Control System Designer, на вкладке Control System, нажмите Update Blocks.
В окне модели запустите симуляцию.
Чтобы просмотреть выходы симуляции замкнутой системы, дважды кликните блок Scope.
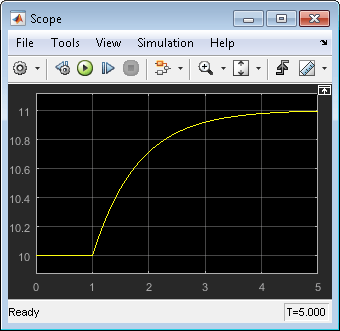
Реакция с обратной связью нелинейной системы удовлетворяет проектным требованиям со время нарастания менее пяти секунд и минимальным перерегулированием.
