Чтобы задать нижние ограничения по запас по амплитуде и фазе линейной системы:
В Response Optimizer выберите Gain and Phase Margin в списке New. Откроется окно, где вы задаете более низкие ограничения по запас по амплитуде и фазе вашей линейной системы.
Укажите имя требования в Name.
Задайте ограничения на запас по амплитуде или запас по фазе или и то, и другое.
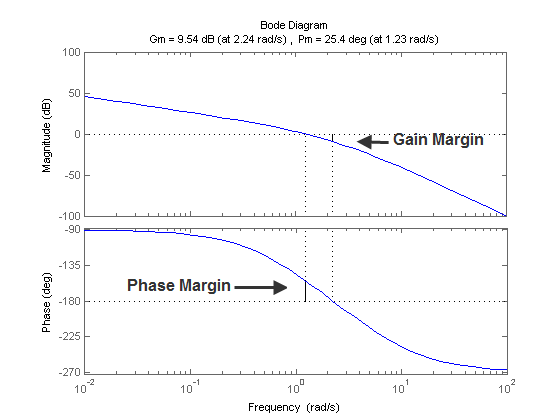
Gain margin - Величина увеличения или уменьшения, необходимая для обеспечения единства усиления цикла на частоте, где угол фазы равен -180 °.
Phase margin - Количество увеличения или уменьшения фазы, требуемое для создания угла фазы -180 °, когда коэффициент усиления цикла равен 1,0
Чтобы задать нижнюю границу запаса по амплитуде или запаса по фазе или и то, и другое, установите соответствующий флажок и введите нижнюю границу значения.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Переменная с заданным именем требования появится в Data области приложения. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать блок Check Gain and Phase Margins (Simulink Control Design), чтобы задать ограничения по запас по амплитуде и фазе. (Требует Simulink® Control Design™.)
Чтобы задать верхние или нижние границы величины отклика системы:
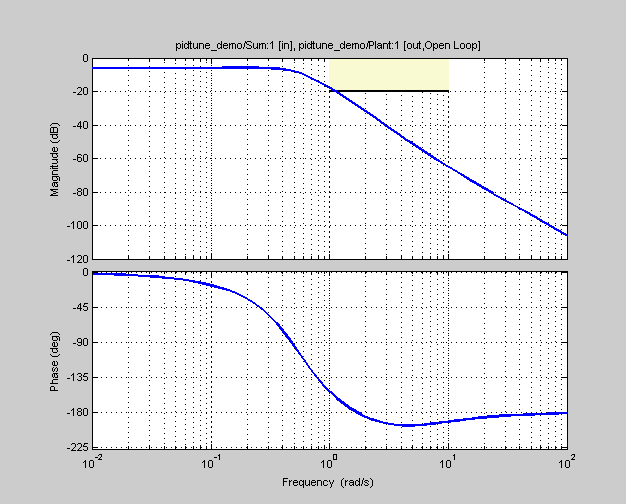
В Response Optimizer выберите Bode Magnitude в списке New. Откроется окно, где вы задаете нижние или верхние границы величины отклика системы.
Укажите имя требования в поле Name.
Тип требования задается с помощью списка Type.
Задайте начальную и конечную частоты ребра и соответствующую величину в столбцах Frequency и Magnitude.
Вставка или удаление связанных ребер.
Щелкните![]() , чтобы задать дополнительные привязанные ребра.
, чтобы задать дополнительные привязанные ребра.
Выберите строку и щелкните![]() , чтобы удалить связанное ребро.
, чтобы удалить связанное ребро.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в области Data окна Response Optimizer приложения. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать блок Check Bode Characteristics (Simulink Control Design), чтобы задать ограничения на величину отклика системы. (Требуется Simulink Control Design.)
Чтобы задать верхнюю границу для максимальной чувствительности системы с обратной связью:
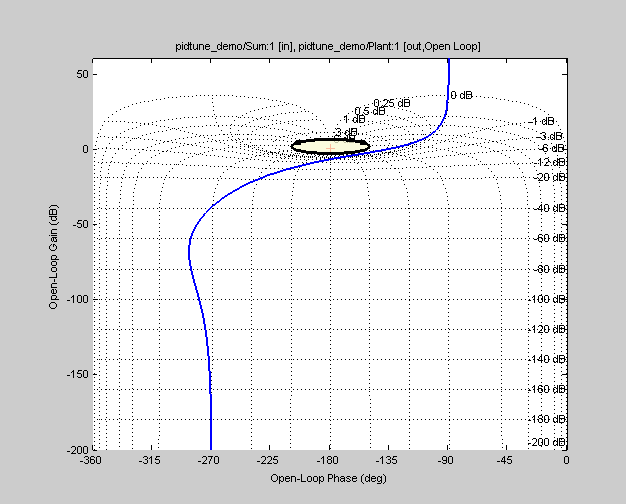
В Response Optimizer выберите Closed-Loop Peak Gain в списке New. Откроется окно, где вы задаете верхнюю границу пикового усиления системы с обратной связью.
Укажите имя требования в поле Name.
Задайте верхнюю границу пикового усиления с обратной связью в Closed-Loop peak gain поле.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в области Data окна Response Optimizer приложения. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать блок Check Nichols Characteristics (Simulink Control Design), чтобы задать ограничения на величину отклика системы. (Требуется Simulink Control Design.)
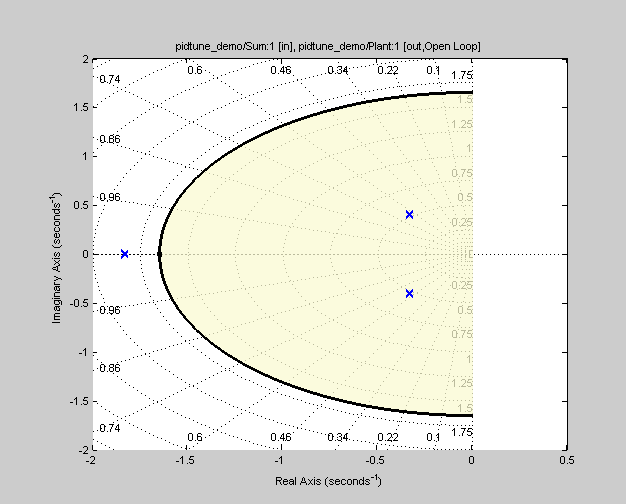
Чтобы задать нижнюю границу для коэффициента затухания системы:
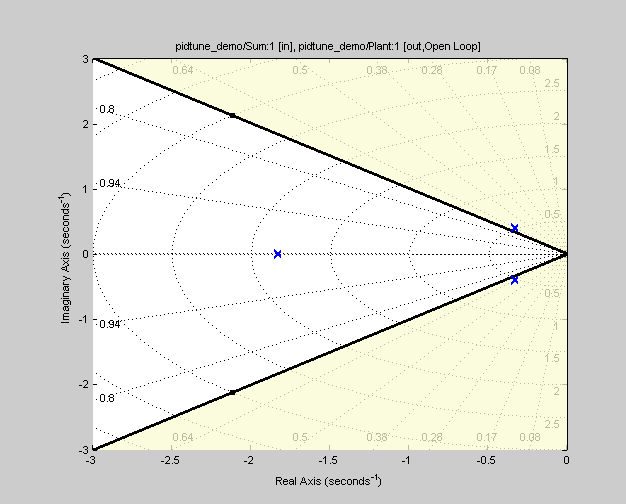
В Response Optimizer выберите Damping Ratio в списке New. Откроется окно, в котором вы задаете нижнюю границу на коэффициент затухания системы.
Укажите имя требования в поле Name.
Задайте нижнюю границу коэффициента затухания в Damping ratio поле.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в Data области приложения Response Optimizer. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать блок Check Pole-Zero Characteristics (Simulink Control Design), чтобы задать границу коэффициента затухания. (Требуется Simulink Control Design.)
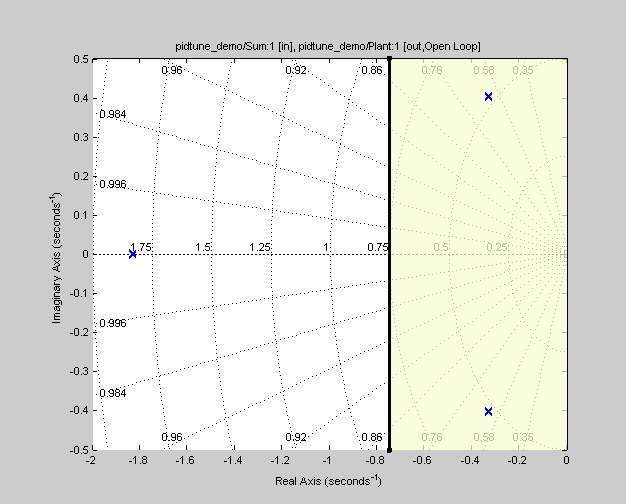
Чтобы задать ограничение на естественную частоту системы:
В Response Optimizer выберите Natural Frequency в списке New. Откроется окно, в котором вы задаете границу для собственной частоты системы.
Укажите имя требования в поле Name.
Задайте нижнюю или верхнюю границу собственной частоты в Natural frequency поле.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в Data области приложения Response Optimizer. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать блок Check Pole-Zero Characteristics (Simulink Control Design), чтобы задать границу на собственной частоте. (Требуется Simulink Control Design.)
Чтобы задать верхнюю границу приблизительного времени урегулирования системы:
В Response Optimizer выберите Settling Time в списке New. Откроется окно, в котором вы задаете верхнюю границу для приблизительного времени урегулирования системы.
Укажите имя требования в поле Name.
Задайте верхнюю границу приблизительного времени урегулирования в Settling time поле.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в Data области приложения Response Optimizer. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать Check Pole-Zero Characteristics (Simulink Control Design) блок, чтобы задать приблизительное время урегулирования. (Требуется Simulink Control Design.)
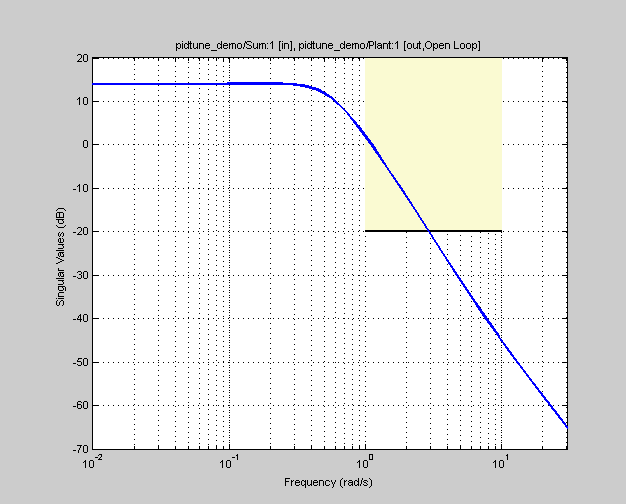
Чтобы задать кусочно-линейные верхнюю и нижнюю границы сингулярных значений системы:
В Response Optimizer выберите Singular Values в списке New. Откроется окно, где вы задаете нижние или верхние границы сингулярных значений системы.
Укажите имя требования в поле Name.
Тип требования задается с помощью списка Type.
Задайте начальную и конечную частоты ребра и соответствующую величину в Frequency и Magnitude столбцах, соответственно.
Вставка или удаление связанных ребер.
Щелкните, ![]() чтобы задать дополнительные привязанные ребра.
чтобы задать дополнительные привязанные ребра.
Выберите строку и щелкните![]() , чтобы удалить связанное ребро.
, чтобы удалить связанное ребро.
В Select Systems to Bound разделе выберите линейные системы, к которым применяется это требование.
Линейные системы заданы временами моментальных снимков, в которых модель линеаризируется, и наборами точек ввода-вывода линеаризации, определяющими системные входы и выходы.
Задайте время симуляции, в которое модель линеаризируется с помощью поля Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в Data области приложения Response Optimizer. Графическое отображение требования также появляется в окне Response Optimizer приложения.
(Необязательно) В графическом отображении можно:
Кроме того, можно использовать блок Check Singular Value Characteristics (Simulink Control Design), чтобы задать границы сингулярного значения. (Требуется Simulink Control Design).
Чтобы применить требование переходной характеристики к линеаризации вашей модели (требует Simulink Control Design), задайте характеристики переходной характеристики следующим образом:
Выберите требование к переходной характеристике из Response Optimizer.
В раскрывающемся меню New приложения, в разделе New Frequency Domain Requirement, выберите Step Response Envelope.
Откроется диалоговое окно Создать требование (Create Requirement), в котором можно задать требования к переходной характеристике.
Укажите имя требования в Name поле диалогового окна.
Задайте характеристики переходной характеристики:
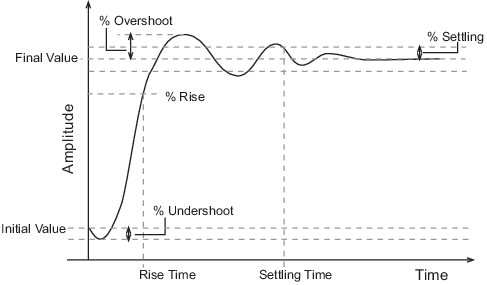
Initial value - Входной уровень перед выполнением шага
Step time - Время, в которое происходит шаг
Final value - Входной уровень после выполнения шага
Rise time - время, необходимое для достижения ответным сигналом заданного процента от области значений шагов. Шаговая область значений является различием между конечным и начальным значением.
% Rise - Процент шага области значений используемый с Rise time для определения общих характеристик времени нарастания.
Settling time - Время, затраченное до тех пор, пока ответный сигнал не установится в заданной области вокруг конечного значения. Эта область расчета определяется как окончательное значение шага плюс или минус заданный процент конечного значения.
% Settling - Процент конечного значения, который определяет область значений установления характеристики времени урегулирования, указанной в Settling time.
% Overshoot - величина, на которую ответный сигнал может превысить окончательное значение. Это значение задается в процентах от области значений шагов. Шаговая область значений является различием между конечным и начальным значением.
% Undershoot - величина, на которую ответный сигнал может перерегулировать начальное значение. Это значение задается в процентах от области значений шагов. Шаговая область значений является различием между конечным и начальным значением.
Укажите системы, которые будут связаны.
Чтобы применить это требование к линеаризации вашей модели Simulink:
В области Select Systems to Bound задайте время симуляции, в которое модель линеаризируется в Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set.
, чтобы открыть диалоговое окно Create linearization ввод-вывод set.
Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Кроме того, можно использовать блок Check Step Response Characteristics, чтобы задать границы переходной характеристики для сигнала.
Можно задать пользовательские требования, такие как минимизация энергии системы. Чтобы задать пользовательские требования:
В Response Optimizer, в New меню, выберите Custom Requirement. Откроется диалоговое окно Создать требование (Create Requirement), в котором вы задаете пользовательское требование.
Укажите имя требования в Name.
Укажите тип требования в раскрывающемся меню Type.
Укажите имя функции, содержащей пользовательское требование в Function. Поле должно быть задано как указатель на функцию, использующий @. Функция должна быть на MATLAB® путь. Щелкните![]() , чтобы просмотреть или изменить функцию.
, чтобы просмотреть или изменить функцию.
Если функция не существует, нажатие![]() открывает ФАЙЛ MATLAB шаблона. Используйте этот файл для реализации пользовательского требования. Имя функции по умолчанию
открывает ФАЙЛ MATLAB шаблона. Используйте этот файл для реализации пользовательского требования. Имя функции по умолчанию myCustomRequirement.
(Необязательно) Чтобы предотвратить рассмотрение решателем определенных комбинаций параметров, выберите Error if constraint is violated. Используйте эту опцию только для ограничений, связанных с параметрами.
Во время итерации оптимизации решатель сначала оценивает требования с помощью этой опции.
Если ограничение нарушено, решатель пропускает оценку любых оставшихся требований и переходит к следующей итерации.
Если ограничение не нарушено, решатель оценивает оставшиеся требования для текущей итерации. Если какая-либо из остальных требований связывает сигналы или системы, то решатель моделирует модель.
Для получения дополнительной информации смотрите Пропустить симуляцию модели на основе нарушения ограничений параметра (GUI).
Примечание
Если вы установите этот флажок, не задайте сигналы или системы, которые будут связаны. Если вы задаете сигналы или системы, этот флажок игнорируется.
(Необязательно) Задайте сигнал или систему, или оба, которые будут связаны.
Можно применить это требование к сигналам модели или линеаризации вашей модели Simulink (требует Simulink Control Design), или обоих.
Щелкните Select Signals and Systems to Bound (Optional), чтобы просмотреть область сигнала и линеаризации ввода-вывода выбора.
Чтобы применить это требование к сигналу модели:
В области Signal выберите записанный сигнал, к которому вы будете применять требование.
Если вы уже выбрали сигнал для регистрации, как описано в Specify Signals to Log, он появится в списке. Установите соответствующий флажок.
Если вы не выбрали сигнал для регистрации:
Нажмите кнопку. ![]() Откроется диалоговое окно Create Signal Set, где вы задаете записанный сигнал.
Откроется диалоговое окно Create Signal Set, где вы задаете записанный сигнал.
В окне модели щелкните сигнал, к которому вы хотите добавить требование.
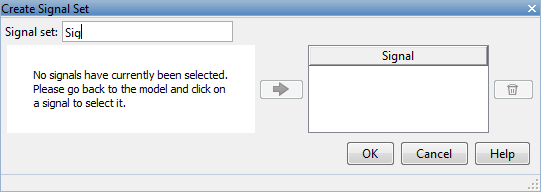
Диалоговое окно Create Signal Set обновляется и отображает имя блока и номер порта, где расположен выбранный сигнал.
Выберите сигнал и щелкните![]() , чтобы добавить его к набору сигналов.
, чтобы добавить его к набору сигналов.
В Signal set поле введите имя для выбранного набора сигналов.
Нажмите OK. Новая переменная с заданным именем появится в Data области Response Optimizer.
Чтобы применить это требование к линейной системе:
Задайте время симуляции, в которое модель линеаризируется в Snapshot Times. Для нескольких моментальных снимков симуляции задайте вектор.
Выберите входной/выходной набор линеаризации из области Linearization I/O.
Если вы уже создали набор ввода/вывода линеаризации, он появится в списке. Установите соответствующий флажок.
Если вы не создали набор ввода/вывода линеаризации, щелкните![]() , чтобы открыть диалоговое окно Create linearization ввод-вывод set. Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
, чтобы открыть диалоговое окно Create linearization ввод-вывод set. Дополнительные сведения об использовании этого диалогового окна см. в разделе «Создание наборов ввода-вывода линеаризации».
Для получения дополнительной информации о линеаризации см. «Что такое линеаризация?» (Simulink Control Design).
Нажмите OK.
Новая переменная с заданным именем появится в Data области Response Optimizer. Графическое отображение требования также появляется в окне Response Optimizer приложения.
