3DOF твердый корпус транспортного средства, чтобы вычислить продольное, боковое, и движение рыскания
Динамика автомобиля транспортное средство
Блок Vehicle Body 3DOF реализует модель жесткого двухосного кузова транспортного средства, чтобы вычислить продольное, боковое и рыскание. Блок учитывает массу тела и аэродинамическое сопротивление между осями из-за ускорения и рулевого управления.
Используйте этот блок в динамике аппарата и беспилотных исследованиях, чтобы смоделировать неголономическое транспортное средство движение, когда транспортное средство шаг, крен и вертикальное движение не значительны.
В библиотеке Vehicle Dynamics Blockset™ существует два типа блоков Vehicle Body 3DOF, которые моделируют продольное, боковое и движение рыскания.
| Блок | Настройка дорожки транспортного средства | Реализация |
|---|---|---|
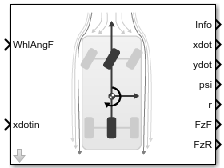
Vehicle Body 3DOF Single Track |
|
|
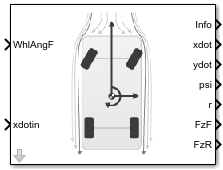
Vehicle Body 3DOF Dual Track |
| Силы действуют на четыре угла транспортного средства или жесткие точки. |
Используйте параметр Axle forces, чтобы задать тип силы.
| Настройка сил оси | Реализация |
|---|---|
|
|
|
|
|
|
Можно использовать эти параметры блоков для создания дополнительных портов входа. В этой таблице перечислены параметры настройки.
Параметр панели входных сигналов | Input port | Описание |
|---|---|---|
Front wheel steering |
| Угол переднего колеса, δF |
External wind |
| Скорость ветра, WX, WY, WZ, в инерционной системе координат |
| External forces | FExt | Внешняя сила транспортного средства центре тяжести (CG), Fx, Fy, Fz, в неподвижной системе координат автомобиля |
| Rear wheel steering | WhlAngR | Угол заднего колеса, δR |
| External friction | Mu | Коэффициент трения |
| External moments |
| Внешний момент вокруг CG, Mx, My, Mz транспортного средства в неподвижной системе координат |
| Hitch forces | Fh | Сила сцепки, приложенная к корпусу в месте сцепки, Fhx, Fhy и Fhz, в неподвижной системе координат автомобиля |
| Hitch moments | Mh | Зацепите момент в месте сцепки, Mhx, Mhy и Mhz, вокруг неподвижной системы координат автомобиля |
Initial longitudinal position |
| Начальное перемещение CG транспортного средства вдоль фиксированной по земле оси X, в м |
Initial lateral position |
| Начальное перемещение CG транспортного средства вдоль фиксированной по земле оси Y, в м |
Initial longitudinal velocity |
| Начальная скорость CG транспортного средства вдоль фиксированной оси X, в м/с |
Initial lateral velocity |
| Начальная скорость CG транспортного средства вдоль фиксированной по оси Y, в м/с |
Initial yaw angle |
| Начальное вращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Z (рыскание), в рад |
Initial yaw rate |
| Начальная скорость вращения автомобиля вокруг фиксированной в транспортном средстве оси Z (скорость рыскания), в рад/с |
Air temperature | AirTemp | Температура окружающего воздуха. Учитывая эту опцию, если необходимо изменить температуру во время выполнения. |
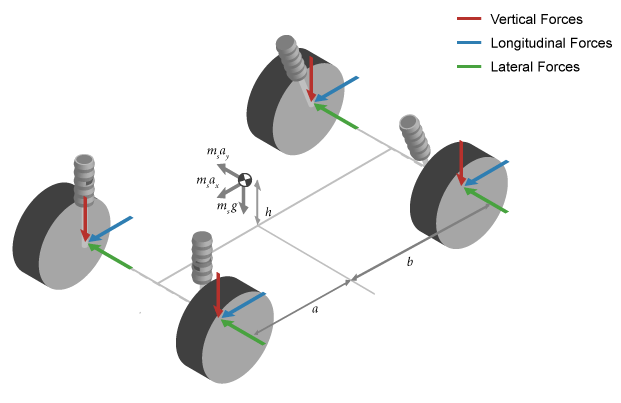
Блок Vehicle Body 3DOF реализует модель жесткого двухосного кузова транспортного средства, чтобы вычислить продольное, боковое и рыскание. Блок учитывает массу тела, аэродинамическое сопротивление и распределение веса между осями из-за ускорения и рулевого управления. Чтобы определить движение транспортного средства, блок реализует эти уравнения для вычислений одной дорожки, двойной дорожки и перетаскивания.
Одиночная дорожка
| Вычисление | Описание |
|---|---|
|
Динамика |
Блок использует эти уравнения, чтобы вычислить плоскую динамику твердого тела. Если вы задаете Axle forces либо Если вы задаете Axle forces |
|
Внешние силы |
Внешние силы включают как входные параметры перетаскивания, так и входы внешних сил. Силы действуют на транспортное средство CG. Если вы задаете Axle forces Если вы задаете Axle forces Блок делит нормальные силы на номинальную нормальную нагрузку, чтобы изменить эффективные параметры трения во время передачи веса и нагрузки. Блок использует эти уравнения, чтобы сохранить равновесие тангажа и крена. |
|
Силы шин | Блок использует отношение локальных и продольных и поперечных скоростей, чтобы определить углы скольжения. Чтобы определить силы шины, блок использует углы скольжения. Если вы задаете Axle forces |
Двойной трек
| Вычисление | Описание |
|---|---|
Динамика | Блок использует эти уравнения, чтобы вычислить плоскую динамику твердого тела. Если вы задаете Axle forces |
Внешние силы | Внешние силы включают как входные параметры перетаскивания, так и входы внешних сил. Силы действуют на транспортное средство CG. Если вы задаете Axle forces Если вы задаете Axle forces Блок делит нормальные силы на номинальную нормальную нагрузку, чтобы изменить эффективные параметры трения во время передачи веса и нагрузки. Блок использует эти уравнения, чтобы сохранить равновесие тангажа и крена. |
Силы шин | Блок использует отношение локальных и продольных и поперечных скоростей, чтобы определить углы скольжения. Блок использует углы рулевого управления, чтобы преобразовать силы шины в неподвижную систему координат автомобиля. Если вы задаете Axle forces |
Сопротивление
| Вычисление | Описание |
|---|---|
|
Преобразование координат |
Блок преобразует скорости ветра из инерционной системы координат в фиксированную систему координат автомобиля. |
|
Перетащите силы |
Чтобы определить относительную воздушную скорость, блок вычитает скорость ветра из скорости транспортного средства CG. Используя относительную воздушную скорость, блок определяет силы сопротивления. |
|
Перетащите моменты |
Используя относительную воздушную скорость, блок определяет моменты перетаскивания. |
Динамика жесткости и релаксации в боковом углу
| Описание | Реализация |
|---|---|
Постоянные значения. | Блок использует постоянные значения жесткости для Cyf и Cyr. |
Интерполяционные таблицы как функция данных угловой жесткости и углов скольжения. | Блок использует интерполяционные таблицы, которые являются функциями угловых данных жесткости и углов скольжения. |
Интерполяционные таблицы как функция данных угловой жесткости и углов скольжения. Углы скольжения включают динамические настройки длины релаксации. | Блок использует интерполяционные таблицы, которые являются функциями угловых данных жесткости и углов скольжения. Углы скольжения включают динамические настройки длины релаксации. Длина релаксации аппроксимирует эффективную угловую силу жесткости, которая является функцией хода колеса. |
В уравнениях используются эти переменные.
| Перемещение, скорость и ускорение транспортного средства вдоль фиксированной оси X | |
| Перемещение, скорость и ускорение транспортного средства CG вдоль фиксированной оси Y | |
ψ | Вращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Z (рыскание) |
r, |
Скорость вращения транспортного средства, вокруг фиксированной осью Z автомобиля (скорость рыскания) |
| Fxf, Fxr |
Продольные силы, приложенные к переднему и заднему колесам, вдоль фиксированной оси X автомобиля |
| Fyf, Fyr |
Боковые силы, приложенные к переднему и заднему колесам, вдоль фиксированной по оси Y автомобиля |
| Fxext, Fyext, Fzext |
Внешние силы, приложенные к транспортного средства, вдоль фиксированных осей X, Y и Z автомобиля |
| Fdx, Fdy, Fdz |
Перетащите силы, приложенные к транспортного средства, вдоль фиксированных осей X, Y и Z автомобиля |
| Fxinput, Fyinput, Fzinput |
Входные силы, приложенные к транспортного средства, вдоль фиксированных осей X, Y и Z автомобиля |
| Mxext, Myext, Mzext |
Внешний момент вокруг CG транспортного средства, вокруг фиксированных x -, y - и z-осей автомобиля |
| Mdx, Mdy, Mdz |
Перетащите момент о транспортного средства, о фиксированных x -, y - и z-осях автомобиля |
| Mxinput, Myinput, Mzinput |
Входной момент о CG транспортного средства, о фиксированных осях X, Y и Z автомобиля |
| Izz | Момент инерции тела автомобиля вокруг фиксированной в транспортном средстве оси Z |
| Fxft, Fxrt |
Продольное усилие шины, приложенное к переднему и заднему колесам, вдоль фиксированной оси X автомобиля |
| Fyft, Fyft |
Боковая сила шины, приложенная к переднему и заднему колесам, вдоль фиксированной по оси Y автомобиля |
| Fxfl, Fxfr |
Продольная сила, приложенная к переднему левому и переднему правому колесам, вдоль фиксированной оси X автомобиля |
| Fyfl, Fyfr |
Боковая сила, приложенная к переднему левому и переднему правому колесам, вдоль фиксированной оси Y автомобиля |
| Fxrl, Fxrr |
Продольная сила, приложенная к задним левому и заднему правому колесам, вдоль фиксированной оси X автомобиля |
| Fyrl, Fyrr |
Боковая сила, приложенная к задним левому и заднему правому колесам, вдоль фиксированной оси Y автомобиля |
| Fxflt, Fxfrt |
Продольное усилие шины, приложенное к передним левому и передним правым колесам, вдоль фиксированной по оси X автомобиля |
| Fyflt, Fyfrt |
Шина бокового усилия, приложенная к передним левому и передним правым колесам, вдоль фиксированной по оси Y автомобиля |
| Fxrlt, Fxrrt |
Продольное усилие шины, приложенное к задним левому и заднему правому колесам, вдоль фиксированной по оси X автомобиля |
| Fyrlt, Fyrrt |
Боковая сила, приложенная к задним левому и заднему правому колесам, вдоль фиксированной оси Y автомобиля |
| Fzf, Fzr |
Нормальная сила, приложенная к переднему и заднему колесам, вдоль фиксированной оси Z автомобиля |
| Fznom |
Номинальная нормальная сила, приложенная к осям, вдоль фиксированной в транспортном средстве оси Z |
| Fzfl, Fzfr |
Нормальная сила, приложенная к передним левому и правому колесам, вдоль фиксированной оси Z автомобиля |
| Fzrl, Fzrr |
Нормальная сила, приложенная к задним левому и правому колесам, вдоль фиксированной оси Z автомобиля |
| m |
Масса кузова транспортного средства |
| a, b |
Расстояние между передним и задним колесами, соответственно, от точки нормальной проекции CG транспортного средства на плоскость общей оси |
| h |
Высота CG транспортного средства над плоскостью оси |
| d | Боковое расстояние от геометрической осевой линии до центра масс вдоль фиксированной оси Y автомобиля |
| hh | Высота сцепки над плоскостью оси вдоль фиксированной оси Z автомобиля |
| dh | Продольное расстояние сцепки от точки нормальной проекции тягача CG до плоскости общей оси |
| hl | Боковое расстояние от центра масс до зацепления вдоль фиксированной по оси Y транспортного средства. |
| αf, αr |
Углы скольжения переднего и заднего колес |
| αfl, αfr |
Углы скольжения переднего левого и правого колес |
| αrl, αrr |
Задние углы скольжения левого и правого колес |
| δf, δr |
Углы поворота руля переднего и заднего колес |
| δrl, δrr |
Задние углы поворота левого и правого колеса |
| δfl, δfr |
Углы поворота руля переднего левого и правого колес |
| wf, wr |
Ширина передней и задней дорожек |
| Cyf, Cyr |
Жесткость поворота переднего и заднего колес |
| Cyfdata, Cyrdata | Данные жесткости поворота переднего и заднего колес |
| σf, σr | Длина релаксации переднего и заднего колес |
| αfσ, αrσ | Углы скольжения переднего и заднего колес, которые включают длину релаксации |
| vwf, vwr | Величина скорости подвески переднего и заднего колес |
| μf, μr |
Коэффициент трения переднего и заднего колес |
| μfl, μfr |
Коэффициент трения переднего левого и правого колес |
| μrl, μrr |
Коэффициент трения заднего левого и правого колес |
| Cd | Коэффициент сопротивления воздуха, действующий вдоль фиксированной оси X автомобиля |
| Cs | Коэффициент сопротивления воздуха, действующий вдоль фиксированной по оси Y автомобиля |
| Cl | Коэффициент сопротивления воздуха, действующий вдоль фиксированной оси Z автомобиля |
| Crm |
Перетащите воздух крена момент, действующий вокруг фиксированной оси X автомобиля |
| Cpm |
Момент тангажа сопротивления воздуха, действующий вокруг фиксированной по оси Y автомобиля |
| Cym |
Перетащите воздух рыскания момент, действующий вокруг фиксированной оси Z автомобиля |
| Af |
Фронтальная область |
| R | Удельная атмосферная газовая константа |
| T | Температура воздуха окружающей среды |
| Pabs | Абсолютное давление окружающей среды |
| wx, wy, wz |
Скорость ветра, вдоль фиксированных осей X -, Y - и Z |
| Wx, Wy, Wz |
Скорость ветра, по инерционной оси X -, Y - и Z |
Vehicle track - Количество дорожекSingle (bicycle) | DualВ библиотеке Vehicle Dynamics Blockset существует два типа блоков Vehicle Body 3DOF, которые моделируют продольное, боковое и движение рыскания.
| Блок | Настройка дорожки транспортного средства | Реализация |
|---|---|---|
Vehicle Body 3DOF Single Track |
|
|
Vehicle Body 3DOF Dual Track |
| Силы действуют на четыре угла транспортного средства или жесткие точки. |
Axle forces - Тип осевой силыExternal longitudinal velocity | External longitudinal forces | External forcesИспользуйте параметр Axle forces, чтобы задать тип силы.
| Настройка сил оси | Реализация |
|---|---|
|
|
|
|
|
|
Front wheel steering — WhlAngF входной портon (по умолчанию) | offЗадайте, чтобы создать входной порт WhlAngF.
External wind — WindXYZ входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт WindXYZ.
External forces — FExt входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт FExt.
External moments — MExt входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт MExt.
Rear wheel steering — WhlAngR входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт WhlAngR.
External friction — Mu входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт Mu.
Hitch forces — Fh входной портon (по умолчанию) | offВыберите, чтобы создать входной порт Fh.
Hitch moments — Mh входной портon (по умолчанию) | offЗадайте, чтобы создать входной порт Mh.
Initial longitudinal position — X_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт X_o.
Initial lateral position — Y_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт Y_o.
Initial longitudinal velocity — xdot_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт xdot_o.
Initial lateral velocity — ydot_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт ydot_o.
Initial yaw angle — psi_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт psi_o.
Initial yaw rate — r_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт r_o.
Air temperature — AirTemp входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт AirTemp.
Number of wheels on front axle, NF - Количество передних колес2 (по умолчанию) | scalarКоличество колес на передней оси, NF. Значение безразмерно.
Number of wheels on rear axle, NR - Количество задних колес2 (по умолчанию) | scalarКоличество колес на задней оси, NR. Значение безразмерно.
Vehicle mass, m - Масса транспортного средства2000 (по умолчанию) | scalarМасса транспортного средства, m, в кг.
Longitudinal distance from center of mass to front axle, a - Расстояние перед осью1.4 (по умолчанию) | scalarРасстояние по горизонтали a от CG транспортного средства до оси переднего колеса, в м.
Longitudinal distance from center of mass to rear axle, b - Расстояние между задними осями1.6 (по умолчанию) | scalarРасстояние по горизонтали b от CG транспортного средства до оси заднего колеса, в м.
Vertical distance from center of mass to axle plane, h - Высота0.35 (по умолчанию) | scalarВысота КР транспортного средства над осями, h, в м.
Longitudinal distance from center of mass to hitch, dh - Расстояние от CM до сцепки1 (по умолчанию) | scalarПродольное расстояние от центра масс до сцепки, dh, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Vertical distance from hitch to axle plane, hh - Расстояние от сцепки до плоскости оси0.2 (по умолчанию) | scalarРасстояние по вертикали от сцепки до плоскости оси, hh, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Initial inertial frame longitudinal position, X_o - Положение0 (по умолчанию) | scalarНачальное перемещение КР транспортного средства вдоль фиксированной по земле оси X, в м.
Initial longitudinal velocity, xdot_o - Скорость0 (по умолчанию) | scalarНачальная скорость CG транспортного средства вдоль фиксированной оси X, в м/с.
Для блоков Vehicle Body 3DOF Single Track или Vehicle Body 3DOF Dual Track, чтобы включить этот параметр, задайте Axle forces одну из следующих опций:
External longitudinal forces
External forces
Front tire corner stiffness, Cy_f - Жесткость12e3 (по умолчанию) | scalarЖесткость угла передней шины, Cyf, в Н/рад.
Для блоков Vehicle Body 3DOF Single Track или Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Rear tire corner stiffness, Cy_r - Жесткость11e3 (по умолчанию) | scalarЗадняя жесткость угла шины, Cyr, в Н/рад.
Для блоков Vehicle Body 3DOF Single Track или Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Initial inertial frame lateral displacement, Y_o - Положение0 (по умолчанию) | scalarНачальное перемещение КР транспортного средства по фиксированной по земле оси Y, в м.
Initial lateral velocity, ydot_o - Скорость0 (по умолчанию) | scalarНачальная скорость CG транспортного средства вдоль фиксированной по оси Y, в м/с.
Mapped corner stiffness - Выборoff (по умолчанию) | onВключает расчет угловой жесткости.
Чтобы включить этот параметр, задайте Axle forces одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Include relaxation length dynamics - Включите динамику длины релаксацииon (по умолчанию) | offВключает динамику длины релаксации.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Lateral distance from geometric centerline to center of mass, d - Расстояние0 (по умолчанию) | scalarБоковое расстояние от геометрической осевой линии до центра масс, d, в м, вдоль фиксированного для автомобиля y. Положительные значения указывают, что CM транспортного средства находится справа от геометрической осевой линии. Отрицательные значения указывают, что CM транспортного средства находится слева от геометрической осевой линии.
Lateral distance from geometric centerline to hitch, hl - Расстояние0 (по умолчанию) | scalarБоковое расстояние от геометрической осевой линии до сцепки, hl, в м, вдоль фиксированного для автомобиля y. Положительные значения указывают, что сцепка находится справа от геометрической осевой линии. Отрицательные значения указывают, что сцепка находится слева от геометрической осевой линии.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Track width - Ширина[1.4,1.4] (по умолчанию) | 1-by- 2
vectorШирина дорожки, w, в м.
Чтобы включить этот параметр, установите Vehicle track равным Dual.
Front tire(s) relaxation length, sigma_f - Длина релаксации.1 (по умолчанию) | scalarДлина передней шины, σf, в м.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Mapped corner stiffness.
Очистить Mapped corner stiffness и выбрать Include relaxation length dynamics.
Rear tire(s) relaxation length, sigma_r - Длина релаксации.1 (по умолчанию) | scalarДлина релаксации задних шин, σr, в м.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Mapped corner stiffness.
Очистить Mapped corner stiffness и выбрать Include relaxation length dynamics.
Front axle slip angle breakpoints, alpha_f_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки прерывания угла скольжения передней оси, αfbrk, в рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Front axle corner data, Cy_f_data - Точки останова[-9e3 9e3] (по умолчанию) | vectorДанные о углу передней оси, Cyfdata, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle slip angle breakpoints, alpha_r_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки прерывания угла скольжения заднего моста, αrbrk, в рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle corner data, Cy_r_data - Данные[-9e3 9e3] (по умолчанию) | vectorДанные по углу задней оси, Cyrdata, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Yaw polar inertia, Izz - Инерция4000 (по умолчанию) | scalarРыскать полярную инерцию, в кг * м ^ 2.
Initial yaw angle, psi_o - Вращение Psi0 (по умолчанию) | scalarВращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Z (рыскание), в рад.
Initial yaw rate, r_o - Скорость рыскания0 (по умолчанию) | scalarСкорость вращения транспортного средства вокруг фиксированной оси Z (скорость рыскания), в рад/с.
Longitudinal drag area, Af - Эффективная площадь поперечного сечения транспортного средства2 (по умолчанию) | scalarЭффективная площадь поперечного сечения транспортного средства, Af, для вычисления аэродинамической силы сопротивления на транспортном средстве, в м2.
Longitudinal drag coefficient, Cd - Коэффициент сопротивления воздуха.3 (по умолчанию) | scalarКоэффициент сопротивления воздуха, Cd. Значение безразмерно.
Longitudinal lift coefficient, Cl - Коэффициент подъема воздуха.1 (по умолчанию) | scalarКоэффициент подъема воздуха, Cl. Значение безразмерно.
Longitudinal drag pitch moment, Cpm - Перетаскивание тангажа.1 (по умолчанию) | scalarКоэффициент тангажа продольного сопротивления, Cpm. Значение безразмерно.
Relative wind angle vector, beta_w - Угол ветра[0:0.01:0.3] (по умолчанию) | vectorОтносительный вектор угла ветра, βw, в рад.
Side force coefficient vector, Cs - Коэффициент боковой силы [0:0.03:0.9] (по умолчанию) | vectorКоэффициент боковой силы вектора коэффициент, Cs. Значение безразмерно.
Yaw moment coefficient vector, Cym - Перетаскивание момента рыскания[0:0.01:0.3] (по умолчанию) | vectorКоэффициент вектора коэффициента рыскания, Cym. Значение безразмерно.
Absolute air pressure, Pabs - Давление101325 (по умолчанию) | scalar | scalarАбсолютное давление окружающей среды, Pabs, в Па.
Air temperature, Tair - Температура273 (по умолчанию) | scalarАбсолютная температура окружающей среды, T, в К.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g - Сила тяжести9.81 (по умолчанию) | scalarУскорение свободного падения, g, в м/с ^ 2.
Nominal friction scaling factor, mu - Масштабный коэффициент трения1 (по умолчанию) | scalarНоминальный коэффициент шкалы трения, μ. Значение безразмерно.
Для блоков Vehicle Body 3DOF Single Track или Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить External Friction.
Longitudinal velocity tolerance, xdot_tol - Допуск.01 (по умолчанию) | scalarПродольная скорость допуска, в м/с.
Nominal normal force, Fznom - Нормальная сила5000 (по умолчанию) | scalarНоминальная нормальная сила, в Н.
Для блоков Vehicle Body 3DOF Single Track или Vehicle Body 3DOF Dual Track, чтобы включить этот параметр, задайте Axle forces одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Geometric longitudinal offset from axle plane, longOff - Продольное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль фиксированной оси X, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы определить местоположение шасси независимо от CG транспортного средства.
Geometric lateral offset from center plane, latOff - Поперечное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от центральной плоскости вдоль фиксированной по оси Y, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff - Смещение по вертикали0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль фиксированной оси Z, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы определить местоположение шасси независимо от CG транспортного средства.
Wrap Euler angles, wrapAng - Выборoff (по умолчанию) | onОберните углы Эйлера к интервалу [-pi, pi]. Для маневров транспортного средства, которые могут подвергнуться вращениям рыскания транспортного средства, которые находятся вне интервала, рассмотрите отмену выбора параметра, если вы хотите:
Отслеживайте общее вращение рыскания транспортного средства.
Избегайте разрывов в оценщиках состояния транспортного средства.
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
Vector Concatenate, Matrix Concatenate | Vehicle Body 3DOF Longitudinal | Vehicle Body 6DOF