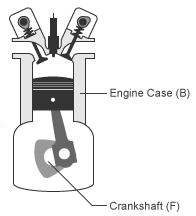
Двигатель внутреннего сгорания с дросселем и вращательной инерцией и задержкой
Simscape / Автомобильная трансмиссия / Engines & Motors

Блок Generic Engine представляет общий двигатель внутреннего сгорания. Этот блок является подходящим типовым механизмом для воспламенения искры и дизелем. Степень скорости и параметризация крутящего момента скорости обеспечиваются. Вход физического сигнала дросселя задает нормированный крутящий момент механизма. Дополнительные динамические параметры включают инерцию коленчатого вала и задержку времени отклика. Выходы порта физического сигнала уровень расхода топлива механизма на основе модели расхода топлива, которую вы выбираете. Дополнительная скорость и проводит практику "красной черты", контроллеры предотвращают останов механизма и включают круиз-контроль.
По умолчанию Типовой Блок двигателя использует запрограммированное отношение между крутящим моментом и скоростью, которая модулируется сигналом дросселя.
Блок оценивает спрос на мощность двигателя в зависимости от скорости вращения двигателя, g (Ω). Функция обеспечивает максимальную мощность, доступную для данной скорости вращения двигателя, Ω. Параметры блоков — Maximum power, Speed at maximum power и Maximum speed — нормируют эту функцию к физическому максимальному крутящему моменту и значениям скорости.
Нормированный входной сигнал дросселя T задает фактическую мощность двигателя. Степень поставляется как часть максимальной мощности, возможной в устойчивом состоянии при фиксированной скорости вращения двигателя. Это модулирует обеспеченную фактическую мощность, P, от механизма: P (Ω, T) = T · g (Ω). Крутящим моментом механизма является τ = P/Ω.
Мощность двигателя является ненулевой, когда скорость ограничивается рабочим диапазоном, Ωmin ≤ Ω ≤ Ωmax. Мощность двигателя абсолютного максимума Pmax задает Ω0, таким образом что Pmax = g (Ω0). Задайте w ≡ Ω/Ω0 и g (Ω) ≡ Pmax · p (w). Затем p (1) = 1 и dp (1)/dw = 0. Функция крутящего момента:
τ = (Pmax/Ω0) · [p (w)/w].
Можно вывести формы для p (w) из данных о механизме и моделей. Типовой Блок двигателя использует форму полинома третьего порядка
p (w) = p1 · w + p2 · w2 – p3 · w3
это удовлетворяет
p1 + p2 – p3 = 1, p1 + 2p2 – 3p3 = 0.
В типичных механизмах pi положителен. Этот полином имеет три нуля, один в w = 0, и сопряженная пара. Одна из пары является положительной и физической; другой является отрицательным и нефизическим:
Для полинома мощности двигателя существуют ограничения на полиномиальные коэффициенты p i, чтобы достигнуть допустимой кривой скорости степени. Если вы используете сведенную в таблицу степень или закручиваете данные, соответствующие ограничения на P (Ω) применяются.
Типичная кривая спроса мощности двигателя
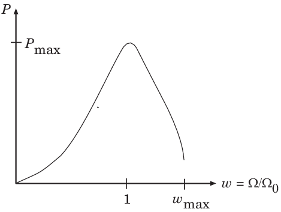
Определите скорость и степень, w = Ω/Ω0 и p = P (Ω)/P0, и задайте контуры как wmin = Ωmin/Ω0 и wmax = Ωmax/Ω0. То:
Блок ограничивает скорость вращения двигателя положительной областью значений выше минимальной скорости и ниже максимальной скорости: 0 ≤ wmin ≤ w ≤ wmax.
Мощность двигателя на минимальной скорости должна быть неотрицательной: p (wmin) ≥ 0. Если вы используете полиномиальную форму, этим условием является ограничение на p i:
p (wmin) = p1 · wmin + p2 · w2min – p3 · wmin3 ≥ 0.
Мощность двигателя на максимальной скорости должна быть неотрицательной: p (wmax) ≥ 0. Если вы используете полиномиальную форму, этим условием является ограничение на wmax: wmax ≤ w+.
Для параметризации по умолчанию блок обеспечивает два варианта типов двигателя внутреннего сгорания, каждого различными параметрами спроса на мощность двигателя.
| Потребление энергии Коэффициент | Тип Engine | |
|---|---|---|
| Воспламенение Spark | Дизель | |
| p 1 | 1 | 0.6526 |
| p 2 | 1 | 1.6948 |
| p 3 | 1 | 1.3474 |
Контроллер скорости холостого хода настраивает сигнал дросселя увеличить вращение механизма ниже задающей скорости согласно следующим выражениям:
и
где:
Π является дросселем механизма.
Πi является входным дросселем (порт T).
Πc является дросселем контроллера.
ω является скоростью вращения коленчатого вала или скоростью вращения двигателя.
ωr является ссылкой скорости холостого хода.
ωt является порогом скорости контроллера.
τ является постоянной времени контроллера.
Управляемый дроссель увеличивается с задержкой первого порядка от нуля до того, когда скорость вращения двигателя падает ниже задающей скорости. Когда скорость вращения двигателя повышается выше задающей скорости, управляемый дроссель уменьшается от одного, чтобы обнулить. Когда различие между скоростью механизма и задающей скоростью меньше, чем порог скорости контроллера, tanh часть уравнения сглаживает производную времени управляемого дросселя. Функция ограничивает управляемый дроссель областью значений [0,1]. Механизм использует больший из входа и управляемых значений дросселя. Если задержка механизма включена, контроллер изменяет вход, прежде чем это вычислит задержку.
В то время как контроллер скорости холостого хода определяет минимальное значение дросселя для поддержания скорости вращения двигателя, проводить практику "красной черты" контроллер предотвращает повышенную скорость на основе максимального входа дросселя. Чтобы определить максимальное значение дросселя, проводить практику "красной черты" диспетчер использует уравнение моделей контроллеров скорости холостого хода. Однако для проводить практику "красной черты" контроллера:
ωr является проводить практику "красной черты" ссылкой скорости.
ωt является проводить практику "красной черты" порогом скорости.
τ является проводить практику "красной черты" постоянной времени.
Чтобы увеличить скорость симуляции, установите Fuel consumption model на No fuel consumption.
Если вы выбираете какую-либо другую опцию для Fuel consumption model, блок должен выполнить нелинейный расчет. Блок решает уравнение, даже если порт FC, который сообщает об уровне расхода топлива, не соединяется с другим блоком.
Когда параметр устанавливается на No fuel consumption, блок не вычисляет расход топлива, даже если порт FC соединяется с другим блоком.
Этот блок содержит ограничение задержки механизма.
Механизмы отстают в их ответе на изменяющуюся скорость и дроссель. Блок опционально поддерживает задержку из-за изменяющегося дросселя только. Симуляция задержки увеличивает точность модели, но уменьшает эффективность симуляции.
Чтобы улучшать производительность симуляции, установите Dynamics> параметр Time Constant к No time constant - Suitable for HIL simulation.





