Установите перевод агента, вращение, шкалу
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Sim3D / Ядро Sim3D
Aerospace Blockset / Анимация / 3D Симуляция
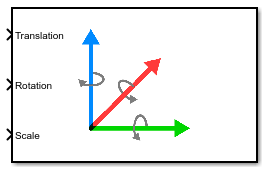
Блок Simulation 3D Actor Transform Set устанавливает перевод агента, вращение и шкалу в 3D среде визуализации.
Блок использует зафиксированную транспортным средством систему координат, которая первоначально выравнивается с инерционной системой мировой координаты.
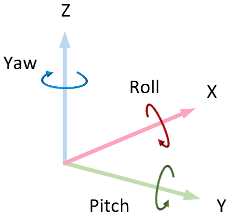
| Ось | Описание |
|---|---|
| X | Передайте направление транспортного средства Крен — вращение, Выполненное правой рукой, вокруг Оси X |
| Y | Расширяет справа от транспортного средства, первоначально найдите что-либо подобное к наземной плоскости Тангаж — вращение, Выполненное правой рукой, вокруг Оси Y |
| Z | Расширяет вверх Рыскание — вращение, Выполненное левой рукой, вокруг оси Z |
Агенты являются объектами сцены, которые поддерживают 3D перевод, вращение и шкалу. Части являются компонентами агента. Компоненты не существуют собой; они сопоставлены с агентом.
Совет
Проверьте, что блок Simulation 3D Actor Transform Set выполняется перед блоком Simulation 3D Scene Configuration. Тем путем Simulation 3D Actor Transform Set готовит данные сигнала перед Нереальным Engine® 3D среда визуализации получает его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по блокам и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Simulation 3D Actor Transform Set — -1
Для получения дополнительной информации о порядке выполнения, смотрите Порядок выполнения Управления и Отображения.
Simulation 3D Actor Transform Get | Simulation 3D Camera Get | Simulation 3D Scene Configuration | Vehicle Terrain Sensor

