Транспортное средство и расстояния шины до объектов
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Sim3D / Транспортное средство Sim3D / Компоненты
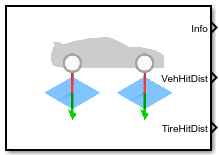
Блок Vehicle Terrain Sensor реализует трассировку лучей, чтобы обнаружить ландшафт ниже шин и объектов перед транспортным средством. А именно, для этих компонентов агента блок возвращает местоположение хита (в системе мировой координаты) и расстояние до объекта.
Кузов
Оставленное переднее колесо
Правильное переднее колесо
Оставленное заднее колесо
Правильное заднее колесо
Совет
Проверьте, что блок Vehicle Terrain Sensor выполняется перед блоком Simulation 3D Fisheye Camera. Тем путем, Нереальный Engine® 3D среда визуализации готовит данные, прежде чем блок Vehicle Terrain Sensor получит его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по блокам и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Vehicle Terrain Sensor — 1
Для получения дополнительной информации о порядке выполнения, смотрите Порядок выполнения Управления и Отображения.
Агенты являются объектами сцены, которые поддерживают 3D перевод, вращение и шкалу. Части являются компонентами агента. Компоненты не существуют собой; они сопоставлены с агентом.
Чтобы вычислить расстояния хита, показанные на рисунке, блок реализует эти уравнения.
| Передняя сторона транспортного средства, чтобы возразить, DistToHitVhAdjust |
DistToHitVh = GetLength(CntrLocVh,HitLocVh) DistToHitVhAdjust = DistToHitVh - VehCntrLngthVal EndLocVh = CntrLocVh + VehRayLngth - VehRayOffset VehRayOffset = CntrLocVh - StartLocVh VehRayLngth = StartLocVh - EndLocVh |
Шины к ландшафту, DistToHitTrAdjust |
DistToHitTr = GetLength(CntrLocTr, HitLocTr) DistToHitTrAdjust = DistToHitTr - TireRadiiVal EndLocTr = CntrLocTr + LengthTr - OffsetTr OffsetTr = CntrLocTr - StartLocTr LengthTr = StartLocTr - EndLocTr |
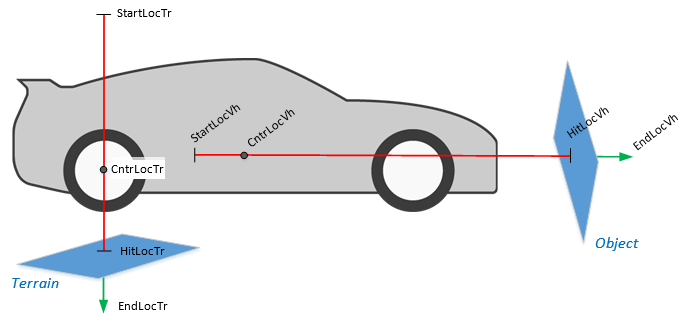
Этот рисунок и уравнения используют эти переменные.
| CntrLocVh | Местоположение центра транспортного средства |
| DistToHitVh | Расстояние от транспортного средства сосредотачивает местоположение, чтобы возразить |
| DistToHitVhAdjust | Расстояние от передней стороны транспортного средства, чтобы возразить |
| EndLocVh | Луч транспортного средства прослеживает конец |
| HitLocVh | Транспортное средство врезалось в местоположение |
| OffsetVh | Трассировка транспортного средства возмещена |
| StartLocVh | Трассировка луча транспортного средства запускается |
| VehRayLngth | Длина трассировки транспортного средства |
| VehCntrLngthVal | Расстояние от транспортного средства сосредотачивается к передней стороне |
| CntrLocTr | Утомите центральное местоположение |
| DistToHitTr | Расстояние от шины сосредотачивает местоположение к ландшафту |
| DistToHitTrAdjust | Расстояние от шины до ландшафта |
| HitLocTr | Утомите местоположение хита |
| EndLocTr | Утомите конец трассировки луча |
| OffsetTr | Утомите смещение трассировки |
| StartLocTr | Утомитесь трассировка луча запускаются |
| LengthTr | Утомите длину трассировки |
| TireRadiiVal | Утомите радиус |
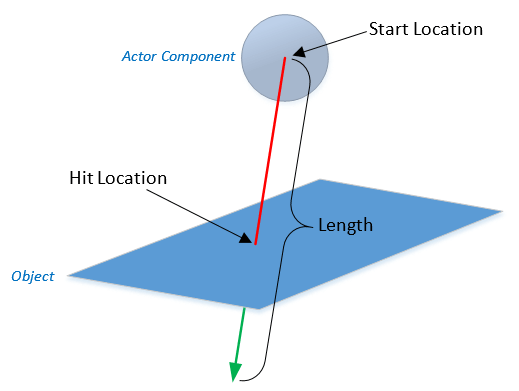
Чтобы определить событие хита, блок использует трассировку луча. Блок обеспечивает местоположение хита в системе мировой координаты.
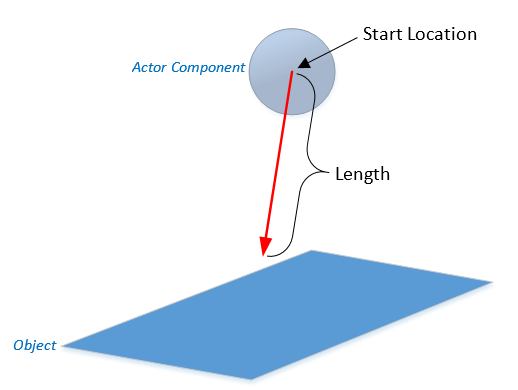
Чтобы определить событие мисс, блок использует трассировку луча.
Simulation 3D Camera Get | Simulation 3D Scene Configuration | Simulation 3D Vehicle | Simulation 3D Vehicle with Ground Following
