Начальное представление условия для линейных независимых от времени систем
initialCondition объект инкапсулирует информацию о начальном условии для модели линейного независимого от времени (LTI). Объект обобщает числовое векторное представление начальных состояний модели в пространстве состояний так, чтобы информация применилась к линейным моделям любой формы — передаточные функции, полиномиальные модели или модели в пространстве состояний.
Можно оценить и получить начальные условия, когда вы идентифицируете линейную модель с помощью команд такой как tfest или сравните ответ модели на измеренное использование данных о вводе/выводе compare. Программное обеспечение оценивает начальное значение условия путем минимизации симуляции или ошибки предсказания против измеренных выходных данных. Можно затем применить те начальные условия в последующей симуляции, с помощью команд такой как sim или predict, подтвердить производительность модели относительно тех же данных об измерении. Используйте initialCondition команда, чтобы создать initialCondition объект из спецификации модели в пространстве состояний или из любой модели LTI свободного ответа.
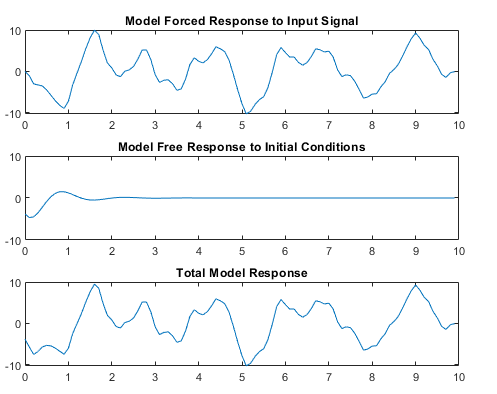
initialCondition объект может также быть рассмотрен как представление свободного ответа линейной модели. Функции симуляции используют эту информацию, чтобы вычислить ответ модели следующим образом:
Вычислите принудительный ответ модели к входному сигналу. Принудительный ответ является стандартной симуляцией выход, когда нет никаких заданных начальных условий.
Вычислите импульсную характеристику модели и масштабируйте результат сгенерировать свободный ответ модели к заданным начальным условиям.
Добавьте спрессованный ответ и свободный ответ, чтобы сформировать общий отклик системы.
Фигура иллюстрирует этот процесс.
Для непрерывных систем (Ts = 0), свободный ответ G (s) для вектора начального состояния x0
Здесь, C эквивалентен матрице измерения пространства состояний, C и A эквивалентны состоянию пространства состояний матричный A.
Для дискретных систем (Ts> 0), свободный ответ G (z)
initialCondition объект представляет свободный ответ в форме пространства состояний. Объект является структурой со свойствами, содержащими пространство состояний A и матрицы C и вектор начального состояния x0. Для idtf и idpoly модели, с помощью initialCondition объект является единственным способом представлять и использовать начальные условия для симуляции. Для idss модели, можно использовать любого initialCondition возразите или числовой вектор начального состояния. Когда вы получаете начальные условия ic для данных о мультиэксперименте, ic объектный массив, с одним initialCondition объект для каждого эксперимента.
Можно получить initialCondition объект одним из четырех способов.
Оценка модели — Указывает, что оценка функциональный возврат предполагаемое начальное условие, которое соответствует данным о вводе/выводе оценки. Например, можно использовать следующую команду, чтобы получить предполагаемое начальное условие ic для модели sys передаточной функции это оценивается с данными о вводе/выводе z.
[sys,ic] = tfest(z,2,1)
Сравнение модели к данным с помощью любых данных о вводе/выводе — Задает это compare возвратите предполагаемое начальное условие, которое функция оценивает внутренне, чтобы поддержать fit оценка. Например, можно использовать следующую команду, чтобы получить начальное условие ic для линейной модели sys при определении подгонки против данных о вводе/выводе zyp симулированный или предсказал выход модели.
[yp,fit,ic] = compare(z,sys)
Прямая конструкция — Использование initialCondition команда, чтобы инкапсулировать форму пространства состояний модели свободного ответа в initialCondition объект.
ic = initialCondition(A,X0,C,Ts)
Преобразование модели свободного ответа — Использование initialCondition команда, чтобы преобразовать модель свободного ответа LTI в initialCondition объект.
ic = initialCondition(G)
Для примера смотрите, Преобразуют Модель Свободного Ответа в Объект initialCondition.
Для получения информации о функциях можно использовать, чтобы извлечь информацию из или преобразовать initialCondition объекты, см. Функции объекта.
ic = initialCondition(A,X0,C,Ts)initialCondition объект, который представляет свободный ответ на начальное условие, описанное в форме пространства состояний, модели LTI.
ic хранилища эта модель в форме свойств. A и C соответствуйте реализации пространства состояний модели, X0 к вектору начального состояния x0 и Ts к шагу расчета. Можно использовать ic задавать начальные условия при симуляции любого типа системы LTI.
Функции, применимые к initialCondition объекты - те, которые могут возвратиться, использовать или преобразовать объекты.
| Роль Начального условия (IC) | Тип функции LTI | Пример синтаксиса | Ссылки в качестве примера |
|---|---|---|---|
| Возвратите оцененные объекты IC | Все функции оценки, compare | [sys,ic] = tfest(data,2,1) | Получите предполагаемые начальные условия |
| Используйте объекты IC для ответа модели | Опция устанавливает для функций отклика модели | opt = simOptions('InitialCondition',ic) | Примените начальные условия в симуляции |
| Преобразуйте объекты IC в Модели Динамической системы (DSMs) | Функции объекта DSM | g = idtf(ic) | Визуализируйте свободный ответ на начальное условие |
| Анализируйте модели, преобразованные от объектов IC | Аналитические функции DSM | y_g = impulse(g) | Визуализируйте свободный ответ на начальное условие |
Оцените модель передаточной функции и получите оцененные начальные условия.
Загрузите и отобразите данные на графике.
load iddata1ic.mat z1i plot(z1i)

Выходные данные не запускаются в 0.
Оцените передаточную функцию второго порядка sys_tf. Укажите что функциональный возврат начальные условия ic.
[sys_tf,ic] = tfest(z1i,2,1);
Исследуйте содержимое icic включает, в форме пространства состояний, свободная модель ответа, заданная матрицами A и C, вектор начального состояния X0, и шаг расчета Ts.
A = ic.A
A = 2×2
-2.9841 -5.5848
4.0000 0
C = ic.C
C = 1×2
0.2957 5.2441
x0 = ic.X0
x0 = 2×1
-0.9019
-0.6161
Ts = ic.Ts
Ts = 0
ic характерно для данных об оценке z1i. Можно использовать ic установить начальные условия, когда вы симулируете любую модель LTI с помощью входного сигнала от z1i и сравните ответ с z1i выходной сигнал.
Визуализируйте свободный ответ, инкапсулировавший в initialCondition объект путем генерации импульсной характеристики.
Оцените передаточную функцию и возвратите начальное условие ic_tf.
load iddata1ic z1i [sys_tf,ic_tf] = tfest(z1i,2,1); ic_tf
ic_tf =
initialCondition with properties:
A: [2x2 double]
X0: [2x1 double]
C: [0.2957 5.2441]
Ts: 0
ic_tf содержит информацию, необходимую, чтобы вычислить свободный ответ на начальное условие.
Преобразуйте ic_tf в idss объект, который может быть передан impulse функция.
ic_tfss = idss(ic_tf);
Создайте временной вектор t это охватывает набор данных. Вычислите импульсную характеристику.
t = 0:0.1:9.9;
t = t';
yimp = impulse(ic_tfss,t);
plot(t,yimp)
title('Free Response to Initial Condition')
Свободный ответ является переходным процессом, который продержался в течение приблизительно четырех секунд.
Загрузите данные и оцените передаточную функцию второго порядка sys. Возвратите начальные условия в ic.
load iddata1ic z1i [sys,ic] = tfest(z1i,2,1);
Симулируйте sys использование данных об оценке, но не включая начальное условие. Постройте симулированный выход с измеренным выходом.
y_no_ic = sim(sys,z1i); plot(y_no_ic,z1i) legend('Model Response','Measured Output')

Измеренные и симулированные выходные параметры не соглашаются в начале симуляции.
Включите ic в simOptions опция установила opt. Симулируйте и постройте ответ модели с помощью opt.
opt = simOptions('InitialCondition',ic); y_ic = sim(sys,z1i,opt); plot(y_ic,z1i); legend('Model Response','Measured Output')

Симуляция комбинирует ответ модели на входной сигнал со свободным ответом на начальное условие. Измеренные и симулированные выходные параметры теперь имеют лучшее соглашение в начале симуляции.
Предполагаемый initialCondition объект характерен для данных, из которых вы оценили его. Если вы хотите симулировать свою модель с новыми данными, такими как данные о валидации, необходимо оценить новое начальное условие для тех данных. Для этого используйте compare команда.
Загрузите данные и разделите их в наборы данных оценки и валидации.
load iddata1 z1 z1_est = z1(1:150); z1_val = z1(151:300); plot(z1_est,z1_val); legend('Estimation Data','Validation Data')

Исследуйте стартовые точки каждого набора выходных данных.
e0 = z1_est.y(1)
e0 = -0.5872
v0 = z1_val.y(1)
v0 = -7.4390
Эти два набора данных имеют различные стартовые условия.
Оцените модель передаточной функции второго порядка использование z1_est. Возвратите предполагаемые начальные условия в ic_est. Отобразите X0 свойство ic_est. Это свойство представляет предполагаемый вектор начального состояния что модель свободного ответа, заданная ic_est.A и ic_est.C отвечает на.
[sys,ic_est] = tfest(z1_est,2,1); ic_est.X0
ans = 2×1
-0.4082
0.0095
Можно использовать ic_est если вы хотите симулировать sys использование z1_est. В качестве альтернативы можно использовать compare, который оценивает начальное условие независимо. Используйте compare дважды, однажды чтобы отобразить данные на графике и однажды возвращать результаты. Отобразите вектор начального состояния ic_estc.X0 тот compare оценки.
compare(z1_est,sys)

[yce,fit,ic_estc] = compare(z1_est,sys); ic_estc.X0
ans = 2×1
-0.4082
0.0095
Вектор начального состояния ic_estc.X0 идентично ic_est.
Теперь оцените модель с набором данных валидации. Оцените начальные условия с данными о валидации.
compare(z1_val,sys)

[ycv,fit,ic_valc] = compare(z1_val,sys); ic_valc.X0
ans = 2×1
-1.7536
-0.9547
Можно использовать ic_val когда вы симулируете sys с z1_val входной сигнал и сравнивает ответ модели на z1_val выходной сигнал.
Оцените initialCondition объектный массив с помощью данных о мультиэксперименте.
Загрузите данные из двух экспериментов. Объедините эти два набора данных в один набор данных мультиэксперимента.
load iddata1 z1 load iddata2 z2 z12 = merge(z1,z2)
z12 =
Time domain data set containing 2 experiments.
Experiment Samples Sample Time
Exp1 300 0.1
Exp2 400 0.1
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
plot(z12)

Оцените передаточную функцию второго порядка sys и возвратите начальные условия в ic.
np = 2; nz = 1; [sys,ic] = tfest(z12,np,nz); ic
ic=1×2 object
1x2 initialCondition array with properties:
A
X0
C
Ts
ic объектный массив. Отобразите содержимое каждого объекта.
ic(1,1)
ans =
initialCondition with properties:
A: [2x2 double]
X0: [2x1 double]
C: [-0.7814 5.2530]
Ts: 0
ic(1,2)
ans =
initialCondition with properties:
A: [2x2 double]
X0: [2x1 double]
C: [-0.7814 5.2530]
Ts: 0
Сравните Ax0 , и C свойства для каждого объекта.
A1 = ic(1,1).A
A1 = 2×2
-3.4824 -5.5785
4.0000 0
A2 = ic(1,2).A
A2 = 2×2
-3.4824 -5.5785
4.0000 0
C1 = ic(1,1).C
C1 = 1×2
-0.7814 5.2530
C2 = ic(1,2).C
C2 = 1×2
-0.7814 5.2530
X01 =ic(1,1).X0
X01 = 2×1
-0.6528
-0.0067
X02 =ic(1,2).X0
X02 = 2×1
0.3076
-0.0715
A и C матрицы идентичны. Эти матрицы представляют форму пространства состояний sys. X0 векторы отличаются. Это различие следует из различных начальных условий для двух экспериментов.
initialCondition Объект от модели в пространстве состоянийОцените модель в пространстве состояний и возвратите начальные состояния. Из модели и вектора начального состояния, создайте initialCondition объект, который может использоваться с любой линейной моделью.
Загрузите и отобразите данные на графике.
load iddata1ic z1i plot(z1i)

Оцените модель в пространстве состояний и получите предполагаемые начальные условия.
Во-первых, установите 'InitialState' аргумент пары "имя-значение" в ssestOptions к 'estimate', который заменяет настройку по умолчанию 'auto'. 'estimate' установка всегда оценивает начальные состояния. 'auto' установка использует 'zero' установка, если эффект начальных состояний на полной ошибке расчета модели относительно мал и может поэтому привести к вектору начального состояния, содержащему только нули.
opt = ssestOptions; opt = ssestOptions('InitialState','estimate');
Оцените модель в пространстве состояний второго порядка sys_ss. Задайте выходной аргумент x0 возвратить вектор начального состояния. Задайте входной параметр opt использовать ваш 'InitialState' установка. После оценки исследуйте x0.
[sys_ss,x0] = ssest(z1i,2,opt); x0
x0 = 2×1
0.0631
0.0329
x0 ненулевой вектор начального состояния.
Симулируйте модель с помощью x0 и сравните выход с исходными выходными данными.
Использовать x0 как начальное условие, задайте 'InitialCondition' аргумент пары "имя-значение" в simOptions как x0.
opt = simOptions;
opt = simOptions('InitialCondition',x0);Симулируйте модель с помощью opt и сохраните ответ в xss.
xss = sim(sys_ss,z1i,opt);
Постройте ответ модели с исходными выходными данными.
t = 0:0.1:19.9; plot(t',[xss.y z1i.y]) legend('ss model','output data') title('Simulated State-Space Model Using Estimated Initial States')

Симуляция запускается в точке близко к начальной точке данных.
С A и C матрицы, x0, и шаг расчета Ts от sys_ss, создайте initialCondition объект ic то, что можно использовать с моделью передаточной функции.
A = sys_ss.A; C = sys_ss.C; Ts = sys_ss.Ts; ic = initialCondition(A,x0,C,Ts)
ic =
initialCondition with properties:
A: [2x2 double]
X0: [2x1 double]
C: [-61.3674 13.4811]
Ts: 0
Оцените модель передаточной функции и симулируйте модель с помощью ic как начальное условие. Сохраните ответ в xtf.
sys_tf = tfest(z1i,2,1);
opt = simOptions('InitialCondition',ic);
xtf = sim(sys_tf,z1i,opt);Постройте ответы модели xss и xtf вместе.
plot(t',[xss.y xtf.y]) legend('ss model','tf model') title('Simulated SS and TF Models with Equivalent Initial Conditions')

Модели отслеживают друг друга тесно в течение симуляции.
initialCondition ОбъектПолучите начальные условия при оценке модели передаточной функции. Преобразуйте initialCondition в модель свободного ответа и модель свободного ответа назад в initialCondition объект.
Загрузите данные и оцените модель sys передаточной функции. Получите предполагаемые начальные условия ic.
load iddata1ic.mat z1i [sys,ic] = tfest(z1i,2,1);
Преобразуйте ic в idtf модель g свободного ответа.
g = idtf(ic);
Постройте импульсную характеристику g.
impulse(g)
title('Impulse Response of g')
Преобразуйте g назад в initialCondition объект ic1.
ic1 = initialCondition(g);
Постройте импульсную характеристику ic1 путем преобразования ic1 в idss модель.
impulse(idss(ic1))
title('Impulse Response of ic1 in idss form')
Импульсные характеристики кажутся идентичными.
Сравните ic и ic1.
ic.A
ans = 2×2
-2.9841 -5.5848
4.0000 0
ic1.A
ans = 2×2
-2.9841 -5.5848
4.0000 0
ic.X0
ans = 2×1
-0.9019
-0.6161
ic1.X0
ans = 2×1
4
0
ic.C
ans = 1×2
0.2957 5.2441
ic1.C
ans = 1×2
-0.8745 -1.7215
A матрицы ic и ic1 идентичны. C матрица и X0 вектор отличается. Существует бесконечно много представлений пространства состояний, возможных для данной линейной модели. Два объекта эквивалентны, как проиллюстрировано импульсными характеристиками.
ssest | tfest | polyest | compare | predictOptions | predict | simOptions | sim | impulse
