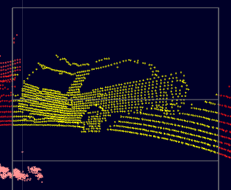
Пометьте достоверные данные в облаках точек лидара
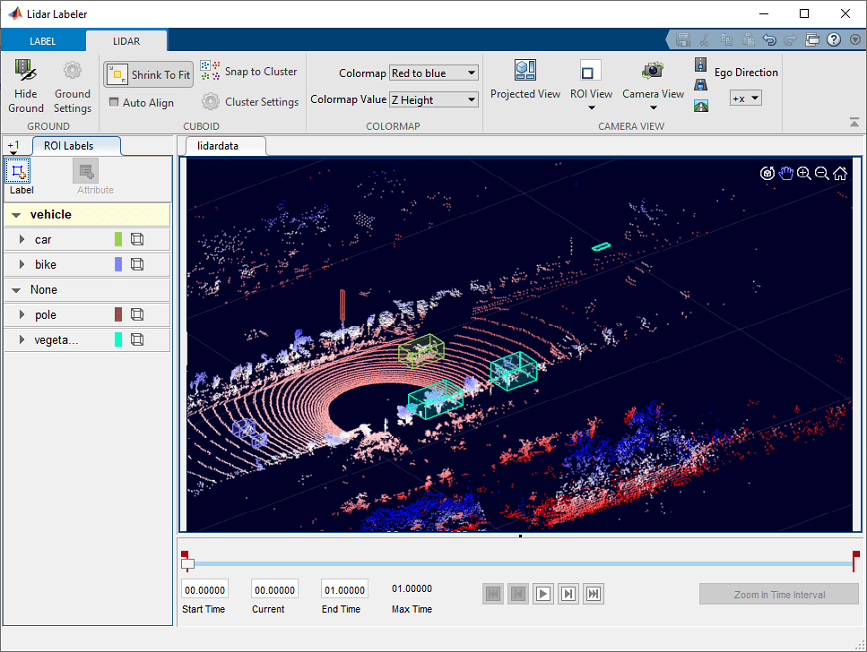
Приложение Lidar Labeler позволяет вам пометить объекты в облаке точек или последовательности облака точек. Приложение считывает данные об облаке точек из PLY, PCAP, LAS, LAZ, ROS и файлов PCD. Используя приложение, вы можете:
Задайте метки видимой области (ROI) кубоида и метки сцены. Используйте их, чтобы интерактивно помечать ваши достоверные данные.
Задайте атрибуты для меток и используйте их, чтобы обеспечить более подробную информацию о метках.
Используйте встроенные алгоритмы для кластеризации, оснуйте плоскую сегментацию, автоматизированную маркировку и отслеживание.
Сохраните определения метки, данные об облаке точек и достоверные данные к файлу сеанса для будущего использования.
Используйте опцию Projected View, чтобы просмотреть метки в верхней части, передней стороне и видах сбоку одновременно.
Используйте опцию Camera View, чтобы создать и снова использовать пользовательские представления данных об облаке точек.
Используйте опцию Auto Align, чтобы вращаться и лучше всего соответствовать кубоиду к кластеру.
Используйте lidar.syncImageViewer.SyncImageViewer класс, чтобы синхронизировать приложение к внешнему инструменту визуализации или анализа.
Запишите, импортируйте и используйте пользовательский алгоритм автоматизации для автоматизированной маркировки.
Оцените эффективность своих алгоритмов автоматизации метки с визуальными сводными данными.
Экспортируйте помеченную основную истину как groundTruthLidar объект. Этот объект может использоваться для системной верификации и обучения детектор объектов.
Чтобы узнать больше об этом приложении, смотрите Начало работы с Lidar Labeler.
MATLAB® Панель инструментов: На вкладке Apps, под Image Processing and Computer Vision, кликают по значку приложения.
Командная строка MATLAB: Войти lidarLabeler.
Метки не поддерживают подметки.
Окно Label Summary не поддерживает подметки.
На левой стороне приложения панель ROI Labels содержит определения метки ROI, которые можно отметить на системах координат облака точек. Можно создать определения метки непосредственно из этой панели. В качестве альтернативы можно создать определения метки программно при помощи labelDefinitionCreatorLidar возразите и затем импортируйте эти определения метки в сеанс приложения.
Поддержки приложений определение меток ROI и атрибутов.
ROI label является меткой, которая соответствует ROI в системе координат сигнала. Эта таблица описывает поддерживаемый тип метки.
| Метка ROI | Описание | Пример |
|---|---|---|
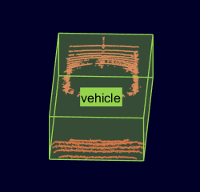
Cuboid | Чертите кубовидные метки ROI вокруг объектов. |
|
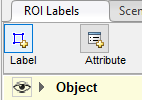
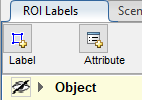
Можно показать или скрыть метки при помощи![]() значка на панели ROI Labels.
значка на панели ROI Labels.
![]() Появляться только после того, как вы задаете метку. По умолчанию, отображения приложения все метки. Чтобы скрыть метку, нажмите
Появляться только после того, как вы задаете метку. По умолчанию, отображения приложения все метки. Чтобы скрыть метку, нажмите![]() на значок вместе с именем метки. Приложение скрывает соответствующую метку и отображает
на значок вместе с именем метки. Приложение скрывает соответствующую метку и отображает![]() значок.
значок.
| Метка Show | Скройте метку |
|
|
|
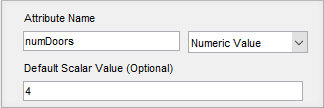
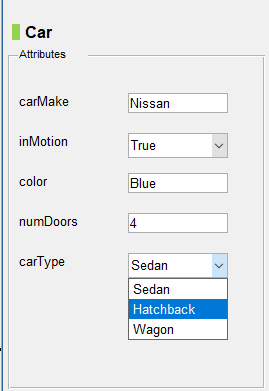
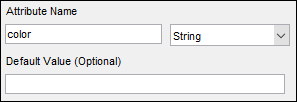
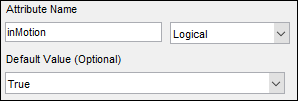
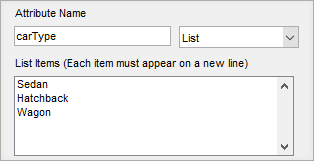
ROI attribute указывает дополнительную информацию о метке ROI. Например, в ведущей сцене, атрибуты могут включать тип или цвет транспортного средства. Эта таблица описывает поддерживаемые типы атрибута.
| Припишите тип | Демонстрационное определение атрибута | Демонстрационные значения по умолчанию |
|---|---|---|
|
|
|
|
| |
|
| |
|
|
Используйте lidar.syncImageViewer.SyncImageViewer класс, чтобы создать инструмент для просмотра изображения, соответствующего данным об облаке точек.
Удалите наземную плоскость, чтобы ясно просмотреть метки созданного объекта.
Используйте вращение, переведите, расширьтесь, и опции уменьшения, чтобы отредактировать кубоиды после привлечения их.
Используйте опцию Camera View, чтобы сохранить представление данных из текущего угла и направления.
Чтобы избежать необходимости повторно помечать основную истину новыми метками, организуйте схему маркировки, которую вы хотите использовать, прежде чем вы начнете отмечать свою основную истину.
Можно скопировать и вставить метки между сигналами, которые имеют тот же тип.