Сгенерируйте пандус положения фиксированной частоты
Motor Control Blockset / Средства управления / Ссылка Управления
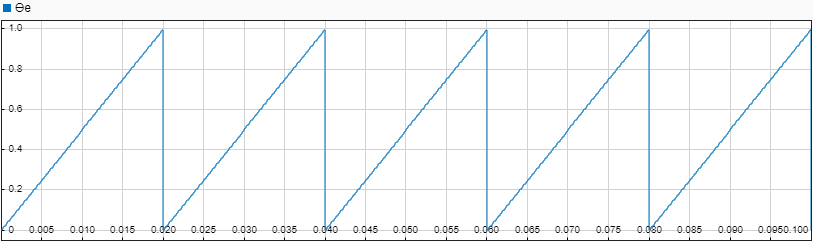
Блок Position Generator генерирует сигнал пандуса положения (с частотой, которая идентична тому из ссылочного сигнала напряжения), использование значения шага положения опорного сигнала.
Мы рекомендуем, чтобы вы использовали фиксированный шаг дискретный решатель для этого блока, чтобы включить генерацию кода и гарантировать точную симуляцию.
ACIM Slip Speed Estimator | Sine-Cosine Lookup | 3-Phase Sine Voltage Generator | Vector Control Reference




