Необходимые усилия в соединениях для данного движения
Robotics System Toolbox / Алгоритмы Манипулятора
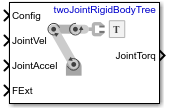
Блок Inverse Dynamics возвращает объединенные крутящие моменты, требуемые для робота обеспечить заданное состояние робота. Чтобы получить необходимые объединенные крутящие моменты, задайте настройку робота (объединенные положения), объединенные скорости, объединенные ускорения и внешние силы.


