Геометрический якобиан для настройки робота
Robotics System Toolbox / Алгоритмы Манипулятора
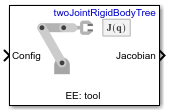
Блок Get Jacobian возвращает геометрический якобиан относительно основы для заданного исполнительного элемента конца в данной настройке rigidBodyTree модель робота.
Якобиан сопоставляет скорость в-конец-исполнительного-элемента объединенной космической скорости относительно основной координатной системы координат. Скорость исполнительного элемента конца равняется:
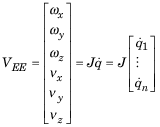
ω является скоростью вращения, υ является линейной скоростью и![]() является объединенной космической скоростью.
является объединенной космической скоростью.
Jacobian — Геометрический якобиан исполнительного элемента концаГеометрический якобиан исполнительного элемента конца с заданной настройкой, Config, возвращенным как 6 n матрицей, где n является количеством степеней свободы исполнительного элемента конца. Якобиан сопоставляет скорость в-конец-исполнительного-элемента объединенной космической скорости относительно основной координатной системы координат. Скорость исполнительного элемента конца равняется:
ω является скоростью вращения, υ является линейной скоростью и![]() является объединенной космической скоростью.
является объединенной космической скоростью.

