Работа с моделями более низкоуровневыми может упростить анализ и систему управления относительно моделей высшего порядка. Более простые модели также легче понять и управлять. Старшие модели, полученные путем линеаризации комплексных моделей Simulink® или из других источников, могут содержать состояния, которые не способствуют очень особенно интересной динамике к приложению. Поэтому может быть полезно уменьшать порядок модели при сохранении образцовых характеристик, которые важны для приложения.
Случаи, где вы можете хотеть уменьшать порядок модели, включают эти ситуации:
Вы работаете с относительно старшей моделью, полученной из линеаризации модели Simulink, выполняя вычисление конечного элемента, соединяя элементы модели или другой источник.
Вы хотите улучшить скорость симуляции модели Simulink в определенной рабочей точке. В этом случае можно линеаризовать фрагмент модели в той рабочей точке и вычислить упрощение уменьшаемого порядка или приближение линеаризовавшей модели. Можно затем заменить фрагмент модели с Блоком LTI, содержащим модель уменьшаемого порядка.
Вы разрабатываете старший контроллер, который вы хотите реализовать как контроллер более низкоуровневый, такой как ПИД-регулятор. Например, проектирование контроллера с помощью Линейных Квадратичных Гауссовых методов или H ∞ методы синтеза может привести к старшему результату. В этом случае можно попытаться уменьшать порядок объекта перед синтезом, уменьшая порядок контроллера после синтеза или обоих.
Вы хотите упростить модель, полученную идентификацией с программным обеспечением System Identification Toolbox™.
Следующая схема иллюстрирует отношение между снижением сложности модели и системой управления.
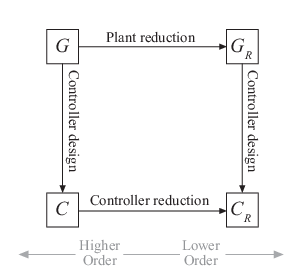
В целом, при разработке контроллера для системы, представленной старшей моделью, G, полезно запуститься путем упрощения модели объекта управления. Затем разработайте контроллер относительно младшего разряда, CR, для модели объекта управления более низкоуровневой GR. После того, как вы разработаете контроллер или для оригинала или для уменьшаемой модели объекта управления, можно попытаться уменьшать контроллер далее.
Сокращение объекта или контроллера может включать:
Отбрасывая состояния, которые не способствуют системной динамике, такой как структурно отключенные состояния или отменяя нулевые полюсом пары.
Отбрасывание низкоэнергетических состояний, которые способствуют относительно мало системной динамике.
Фокусировка на конкретной области частоты и отбрасывание динамики за пределами той области. Например, если ваша пропускная способность управления ограничивается динамикой привода, динамикой более высокой частоты отбрасывания.
В любом случае, когда вы уменьшаете порядок модели, вы хотите сохранить образцовые характеристики, которые важны для вашего приложения. Каждый раз, когда вы вычисляете модель уменьшаемого порядка, проверяете, что упрощенная модель сохраняет временной интервал или поведение частотного диапазона, о котором вы заботитесь. Например, для системы управления, полезно проверить, что уменьшаемая система с обратной связью стабильна. Также полезно проверять, что уменьшаемая передаточная функция разомкнутого цикла, CRGR соответственно совпадает с исходными моделями, где коэффициент усиления разомкнутого контура GC близко к 1 (в области перекрестного соединения усиления).
Чтобы уменьшать порядок модели, можно или упростить модель или вычислить приближение более низкоуровневое. Следующая таблица обобщает различия среди нескольких подходов снижения сложности модели.
| Подход | Командная строка | Приложение Model Reducer |
|---|---|---|
| Модель Simplification — Reduce заказывает точно путем отмены нулевых полюсом пар или устранения состояний, которые не имеют никакого эффекта на полный образцовый ответ | Нулевой полюсом метод Упрощения — Устраняет:
| |
| Приближение — Вычисляет приближение более низкоуровневое вашей модели. | balred — Отбросьте состояния, которые имеют относительно низкий эффект на полный образцовый ответ. | Сбалансированный метод Усечения — состояния Отбрасывания, которые имеют относительно низкий эффект на полный образцовый ответ. |
| Выбор режима — Устраняет полюса и нули, которые выходят за пределы определенного частотного диапазона интереса. | Модель freqsep — Separate в медленную и быструю динамику вокруг заданной частоты среза. | Метод выбора режима — Избранный частотный диапазон интереса и динамики отбрасывания вне той области значений. |
Иногда, приближение может привести к лучшим результатам, даже если модель похожа на хорошего кандидата на упрощение. Например, модели с близкими удалениями нулей-полюсов иногда лучше уменьшаются приближением, чем упрощение. Точно так же использующий balred, чтобы уменьшать модели в пространстве состояний может привести к более точным результатам, чем minreal.
Когда вы используете модель уменьшаемого порядка, всегда проверяете, что упрощение или приближение сохраняют образцовые характеристики, которые важны для вашего приложения. Например, сравните частотные характеристики исходных и упрощенных моделей с помощью bodeplot или sigmaplot. Или, сравните ответы разомкнутого цикла для исходного и уменьшаемого объекта и моделей контроллеров.
