Как правило, движущие силы системы не известны точно и могут отличаться. Например, системная динамика может отличаться из-за:
Изменения значения параметров, вызванные производственными допусками — Например, значение сопротивления резистора обычно в области значений о номинальной стоимости, 5 Ω +/– 5%.
Условия работы — Например, движущие силы самолета изменяются на основе высоты и скорости.
Любой контроллер, который вы разрабатываете для такой системы, должен удовлетворить конструктивные требования для всей потенциальной системной динамики.
Разработать контроллер для системы с переменной динамикой:
Выберите изменения.
Создайте модель LTI для каждой выборки.
Создайте массив выбранных моделей LTI.
Разработайте контроллер для номинальной представительной модели от массива.
Анализируйте проектирование контроллера для всех моделей в массиве.
Если проектирование контроллера не удовлетворяет требования для всех моделей, задает различную номинальную модель и перепроектирует контроллер.
В Control System Designer можно задать многоуровневые модели для любого объекта или датчика в текущей архитектуре управления с помощью массива моделей LTI (см. Образцовые Массивы). Если вы задаете образцовые массивы больше чем для одного объекта или датчика, длины массивов должны соответствовать.
Чтобы создать массивы для мультиобразцовой системы управления, вы можете:
Создайте несколько моделей LTI с помощью tf, ss, zpk или команд frd.
% Specify model parameters. m = 3; b = 0.5; k = 8:1:10; T = 0.1:.05:.2; % Create an array of LTI models. for ct = 1:length(k); G(:,:,ct) = tf(1,[m,b,k(ct)]); end
Создайте массив моделей LTI с помощью команды stack.
% Create individual LTI models. G1 = tf(1, [1 1 8]); G2 = tf(1, [1 1 9]); G3 = tf(1, [1 1 10]); % Combine models in an array. G = stack(1,G1,G2,G3);
Выполните пакетную линеаризацию в нескольких рабочих точках. Затем экспортируйте вычисленные модели LTI, чтобы создать массив моделей LTI. Смотрите Отслеживание уставки в качестве примера двигателя постоянного тока с Изменениями Параметра (Simulink Control Design). (Программное обеспечение Requires Simulink® Control Design™)
Выберите неопределенную модель (uss) пространства состояний с помощью usample.
Вычислите модель uss из модели Simulink. Затем используйте usubs или usample, чтобы создать массив моделей LTI. Смотрите Получают Неопределенную Модель в пространстве состояний из Модели Simulink (Robust Control Toolbox). (Программное обеспечение Requires Robust Control Toolbox™)
Задайте базовый блок Simulink, чтобы линеаризовать к модели uss или ufrd. Смотрите Задают Неопределенную Линеаризацию для Базовых или Пользовательских блоков Simulink (Robust Control Toolbox). (Программное обеспечение Requires Simulink Control Design и Robust Control Toolbox)
Чтобы импортировать модели как массивы, можно передать их как входные параметры при открытии Control System Designer из командной строки MATLAB®. Для получения дополнительной информации смотрите Control System Designer.
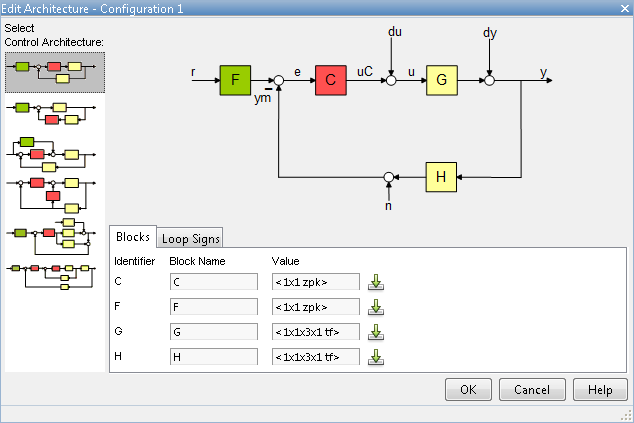
Можно также импортировать образцовые массивы в Control System Designer при конфигурировании архитектуры управления. В диалоговом окне Edit Architecture:
В текстовом поле Value задайте имя модели LTI от рабочего пространства MATLAB.
Чтобы импортировать данные о блоке от рабочего пространства MATLAB или из MAT-файла в вашей текущей рабочей директории, щелкнуть![]() .
.
nominal model является представительной моделью в массиве моделей LTI, которые вы используете, чтобы разработать контроллер в Control System Designer. Используйте редактор и графики для анализа, чтобы визуализировать и анализировать эффект контроллера на остающихся объектах в массиве.
Можно выбрать любую модель в массиве как номинальная модель. Например, можно выбрать модель что:
Представляет ожидаемую номинальную рабочую точку вашей системы.
В среднем модели в массиве.
Представляет объект худшего случая.
Находится самый близкий к точке устойчивости.
Можно построить и анализировать динамику разомкнутого цикла системы на Диаграмме Боде определить который модель выбрать как номинал.
Чтобы выбрать номинальную модель из массива моделей LTI, в Control System Designer, нажимают Multimodel Configuration. Затем в диалоговом окне Multimodel Configuration выберите Nominal model index. Индексом по умолчанию является 1.
Для каждого объекта или датчика, который задан как образцовый массив, приложение выбирает модель в заданном индексе как номинальная модель. В противном случае приложение использует скалярное расширение, чтобы применить одну модель LTI для всех образцовых индексов.
Например, для следующей архитектуры управления:
если G и H являются и трехэлементными массивами и номинальным образцовым индексом, 2, программное обеспечение использует второй элемент в обоих массивы, чтобы вычислить номинальную модель:

Номинальный ответ от r до y:
Приложение также вычисляет и строит ответы, показывающие эффект C на остающихся парах объекта и моделей датчика — G1 H 1 и G 3H3.
Если только G является массивом моделей LTI, и заданная номинальная модель равняется 2, то архитектура управления для номинального ответа:
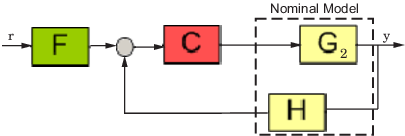
В этом случае номинальный ответ от r до y:
Приложение также вычисляет и строит ответы, показывающие эффект C на остающихся парах объекта и модели датчика — G 1H и G 3H.
Частотная характеристика системы вычисляется в серии значений частоты, названных сеткой частоты. По умолчанию Control System Designer вычисляет логарифмически равномерно распределенную сетку на основе динамического диапазона каждой модели в массиве.
Задайте пользовательскую сетку частоты когда:
Автоматическая сетка имеет больше точек, чем вы требуете. Чтобы повысить вычислительную эффективность, задайте менее плотный интервал сетки.
Автоматическая сетка не является достаточно плотной в конкретном частотном диапазоне. Например, если ответ не получает резонирующую пиковую динамику underdamped системы, задайте более плотную сетку за углом частота.
Вы только интересуетесь ответом в определенных частотных диапазонах. Чтобы повысить вычислительную эффективность, задайте сетку, которая покрывает только частотные диапазоны интереса.
Для получения дополнительной информации об определении векторов с логарифмически распределёнными значениями смотрите logspace.
Изменение сетки частоты не влияет на вычисление частотной характеристики для номинальной модели. Приложение всегда использует опцию Auto select, чтобы вычислить номинальную образцовую частотную характеристику.
Этот пример показывает, как разработать компенсатор для набора моделей объекта управления с помощью Control System Designer.
Создайте массив моделей объекта управления
Создайте массив моделей объекта управления LTI с помощью команды stack.
% Create an array of LTI models to model plant (G) variations.
G1 = tf(1,[1 1 8]);
G2 = tf(1,[1 1 9]);
G3 = tf(1,[1 1 10]);
G = stack(1,G1,G2,G3);
Создайте массив моделей датчика
Точно так же создайте массив моделей датчика.
H1 = tf(1,[1/0.1,1]); H2 = tf(1,[1/0.15,1]); H3 = tf(1,[1/0.2,1]); H = stack(1,H1,H2,H3);
Открытый Control System Designer
Откройте Control System Designer и импортируйте объект и массивы модели датчика.
controlSystemDesigner(G,1,H)
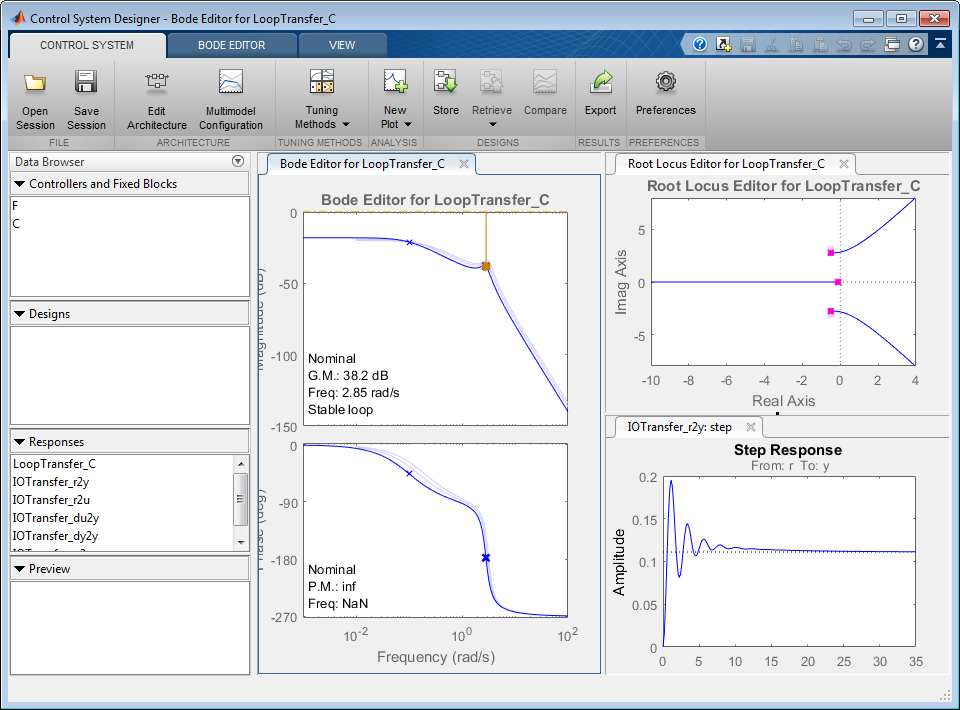
Приложение открывает и импортирует объект и массивы модели датчика.
Сконфигурируйте график для анализа
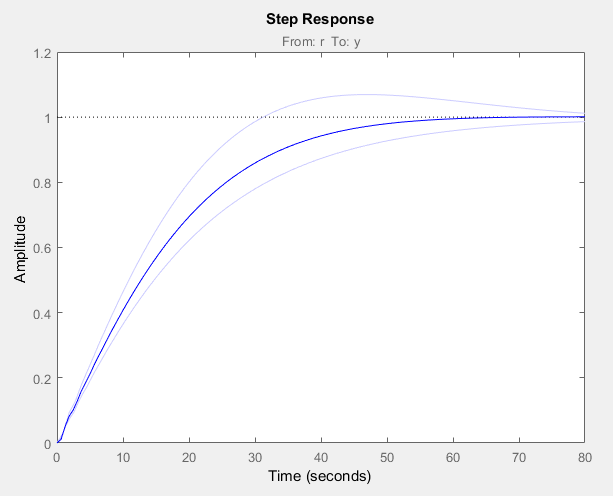
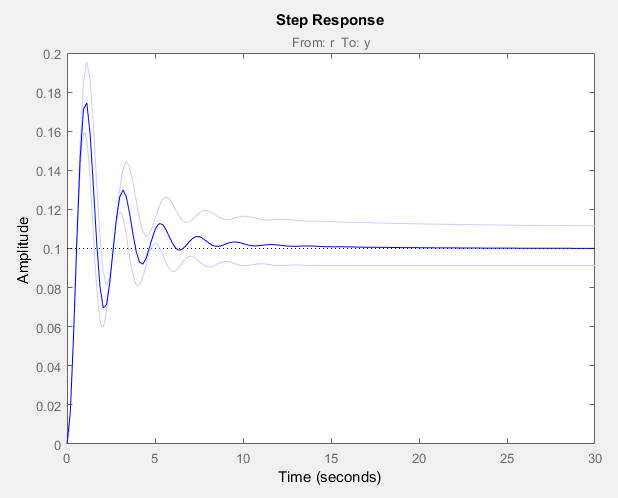
Чтобы просмотреть переходной процесс с обратной связью в большем графике, в Control System Designer, на вкладке View, нажимают Single. Затем нажмите IOTransfer_r2y: step.

По умолчанию переходной процесс показывает только номинальный ответ. Чтобы отобразить отдельные ответы для других образцовых индексов, щелкните правой кнопкой по области построения и выберите Multimodel Configuration> Individual Responses.
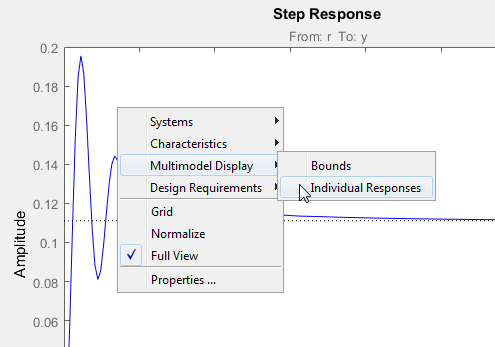
Чтобы просмотреть конверт всех образцовых ответов, щелкните правой кнопкой по области построения и выберите Multimodel Configuration> Bounds
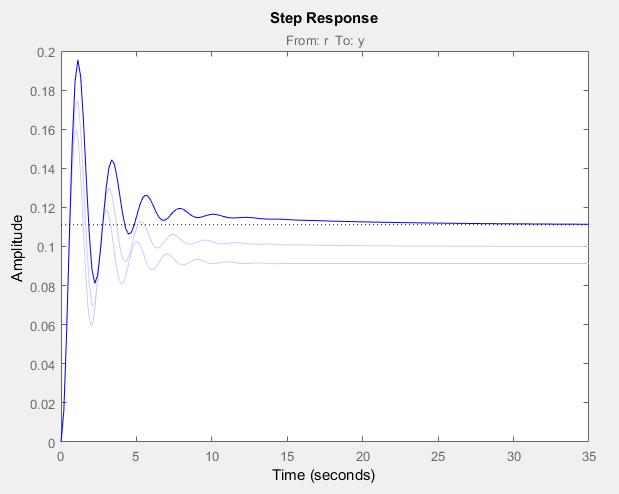
График обновляет, чтобы отобразить ответы для других моделей.
Выберите Nominal Model
На вкладке Control System нажмите Multimodel Configuration.
В диалоговом окне Multimodel Configuration задайте Nominal Model Index 2.
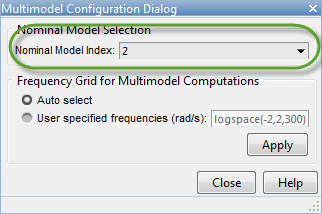
Нажмите Close.
Выбранная номинальная модель соответствует среднему отклику системы.
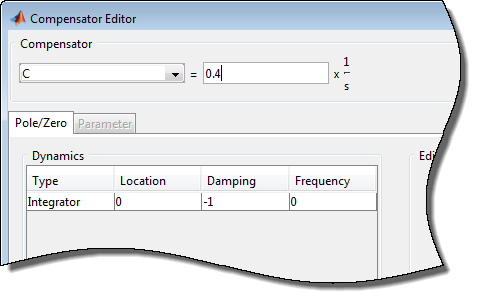
Разработайте компенсатор
Чтобы разработать компенсатор с помощью номинальной модели, можно использовать любой из поддерживаемых Настраивающих Методов Control System Designer.
В данном примере используйте Редактор Компенсатора, чтобы вручную задать динамику компенсатора. Добавьте интегратор в компенсатор и установите усиление компенсатора на 0.4. Для получения дополнительной информации смотрите Динамику Компенсатора Редактирования.
Анализ результатов
Настроенный контроллер производит переходной процесс с минимальным перерегулированием для номинальных моделей, и худший случай промахиваются меньше чем по 10%.