Создайте дорожный объект маркировки маршрута
lm = laneMarking(type)lm = laneMarking(type,Name,Value)lm = laneMarking(type)lanespec. Для получения дополнительной информации смотрите Спецификации Маршрута.
lm = laneMarking(type,Name,Value)laneMarking('Solid','Color','yellow') создает чисто желтую маркировку маршрута.
Создайте ведущий сценарий и дорожные центры прямой, 80-метровой дороги.
sc = drivingScenario; roadCenters = [0 0; 80 0];
Создайте объект lanespec для дороги с четырьмя маршрутами. Используйте функцию laneMarking, чтобы задать ее пять маркировок маршрута. Центральная линия является двойным чистым и двойным желтым. Наиболее удаленные строки являются твердыми и белыми. Внутренние строки подчеркиваются штриховой линией и белые.
solidW = laneMarking('Solid','Width',0.3); dashW = laneMarking('Dashed','Space',5); doubleY = laneMarking('DoubleSolid','Color','yellow'); lspec = lanespec([2 2],'Width',[5 5 5 5], ... 'Marking',[solidW dashW doubleY dashW solidW]);
Добавьте дорогу к ведущему сценарию. Отобразите дорогу.
road(sc,roadCenters,'Lanes',lspec);
plot(sc)

Моделируйте ведущий сценарий с одним автомобилем, перемещающимся на S-кривой. Создайте и постройте контуры маршрута.
Создайте ведущий сценарий с одной дорогой, имеющей S-кривую.
sc = drivingScenario('StopTime',3);
roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Создайте маршруты и добавьте их в дорогу.
lm = [laneMarking('Solid','Color','w'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(sc,roadcenters,'Lanes',ls);
Добавьте автомобиль, оборудованный датчиком и задайте его траекторию от его скорости и waypoints. Автомобиль перемещается на уровне 30 метров в секунду.
car = vehicle(sc, ... 'ClassID',1, ... 'Position',[-35 20 0]); waypoints = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0]; speed = 30; trajectory(car,waypoints,speed);
Постройте сценарий и соответствующий график преследования.
plot(sc)

chasePlot(car)

Запустите цикл симуляции.
Инициализируйте видимый с большого расстояния график и создайте плоттер схемы, лево-маршрут и плоттеры контура правильного маршрута и дорожный граничный плоттер.
Получите дорожные контуры и прямоугольные контуры.
Получите контуры маршрута налево и право на автомобиль.
Усовершенствуйте симуляцию и обновите плоттеры.
bep = birdsEyePlot('XLim',[-40 40],'YLim',[-30 30]); olPlotter = outlinePlotter(bep); lblPlotter = laneBoundaryPlotter(bep,'Color','r','LineStyle','-'); lbrPlotter = laneBoundaryPlotter(bep,'Color','g','LineStyle','-'); rbsEdgePlotter = laneBoundaryPlotter(bep); legend('off'); while advance(sc) rbs = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); lb = laneBoundaries(car,'XDistance',0:5:30,'LocationType','Center', ... 'AllBoundaries',false); plotLaneBoundary(rbsEdgePlotter,rbs) plotLaneBoundary(lblPlotter,{lb(1).Coordinates}) plotLaneBoundary(lbrPlotter,{lb(2).Coordinates}) plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) end



ввод Тип маркировки маршрута'Unmarked' | 'Solid' | 'Dashed' | 'DoubleSolid' | 'DoubleDashed' | 'SolidDashed' | 'DashedSolid'Тип маркировки маршрута, заданной как одно из этих значений.
'Unmarked' | 'Solid' | 'Dashed' | 'DoubleSolid' | 'DoubleDashed' | 'SolidDashed' | 'DashedSolid' |
|---|---|---|---|---|---|---|
Никакая маркировка маршрута | Сплошная линия | Пунктирная линия | Две сплошных линии | Две пунктирных линии | Сплошная линия на левой, пунктирной линии на праве | Пунктирная линия на левой, сплошной линии на праве |
|
|
|
|
|
|
|
|
Тип маркировки маршрута хранится в Type, свойстве только для чтения возвращенного объекта маркировки маршрута.
Укажите необязательные аргументы в виде пар ""имя, значение"", разделенных запятыми. Имя (Name) — это имя аргумента, а значение (Value) — соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
laneMarking('Dashed','Width',0.25,'Length',5.0) создает маршрут с тире, которые 0,25 метра шириной и расположенные с интервалами на расстоянии в 5 метров.width Ширины маркировки маршрута0.15 (значение по умолчанию) | положительный действительный скалярШирины маркировки маршрута, заданные как пара, разделенная запятой, состоящая из 'Width' и положительного действительного скаляра. Для двойного маркера маршрута та же ширина используется для обеих строк. Модули исчисляются в метрах.
Пример: 0.20
'Color' — Цвет маркировки маршрута[1 1 1] (белое) (значение по умолчанию) | название цвета | триплет RGBЦвет маркировки маршрута, заданной как пара, разделенная запятой, состоящая из 'Color' и названия цвета или триплета RGB. Для двойного маркера маршрута тот же цвет используется для обеих строк.
Для пользовательского цвета укажите триплет RGB. Триплет RGB представляет собой трехэлементный вектор-строку, элементы которого определяют интенсивность красных, зеленых и синих компонентов цвета. Интенсивность должны быть в диапазоне [0,1]; например, [0,4 0,6 0,7]. Кроме того, вы можете задать имена некоторых простых цветов. Эта таблица приводит опции именованного цвета и эквивалентные значения триплета RGB.
| Название цвета | Триплет RGB | Внешний вид |
|---|---|---|
'red' | [1 0 0] |
|
'green' | [0 1 0] |
|
'blue' | [0 0 1] |
|
'cyan'
| [0 1 1] |
|
'magenta' | [1 0 1] |
|
'yellow' | [1 1 0] |
|
'black' | [0 0 0] |
|
'white' | [1 1 1] |
|
Пример: [0.8 0.8 0.8]
'Strength' — Видимость маркировки маршрута1 (значение по умолчанию) | действительный скаляр в области значений [0, 1]Видимость маркировки маршрута, заданной как пара, разделенная запятой, состоящая из 'Strength' и действительного скаляра в области значений [0, 1]. Значение 0 соответствует маркировке, которая не видима. Значение 1 соответствует маркировке, которая абсолютно видима. Для двойной маркировки маршрута та же сила используется для обеих строк.
Пример: 0.20
длина Длина тире в пунктирных линиях3.0 (значение по умолчанию) | положительный действительный скалярДлина тире в пунктирных линиях, заданных как пара, разделенная запятой, состоящая из 'Length' и положительного действительного скаляра. Для двойной маркировки маршрута та же длина используется для обеих строк. Тире является видимой частью пунктирной линии. Модули исчисляются в метрах.
Пример: 2.0
'Space' — Продолжительность пробела между тире в пунктирных линиях9.0 (значение по умолчанию) | положительный действительный скалярПродолжительность пробела между концом одного тире и начало следующего тире, заданного как пара, разделенная запятой, состоящая из 'Space' и положительного действительного скаляра. Для двойной маркировки маршрута та же длина используется для обеих строк. Модули исчисляются в метрах.
Пример: 2.0
Схема показывает компоненты и геометрические свойства дорог, маршрутов и маркировок маршрута.
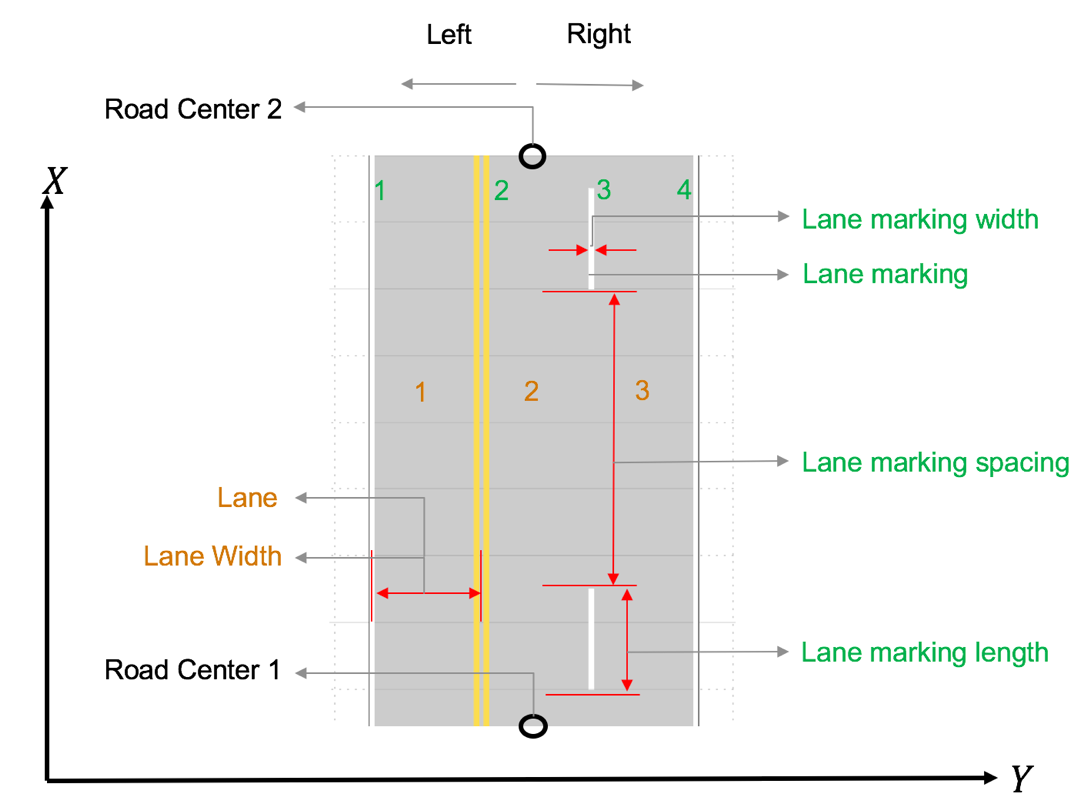
Левый и правый заданы относительно дорожных центров. Задайте дорожные центры как матричный вход к функции road. Дорожные центры создают направленную строку, запускающуюся от первой строки до последней строки матрицы. Левое и правое среднее значение, левое и правое из направленной строки. Ширина дороги является суммой всех ширин маршрута плюс половина ширин маркировок контура левого края и правого края.
Объект спецификации маршрута, lanespec, задает дорожные маршруты.
Свойство NumLanes задает количество маршрутов. Необходимо задать количество маршрутов, когда вы создаете этот объект.
Свойство Width задает ширину каждого маршрута.
Свойство Marking содержит спецификации каждой маркировки маршрута на дороге. Marking является массивом объектов маркировки маршрута с одним объектом на маршрут. Чтобы создать эти объекты, используйте функцию laneMarking. Спецификации маркировки маршрута включают:
Ввод Тип маркировки маршрута (тело, подчеркнутое штриховой линией, и так далее)
Width Ширина маркировки маршрута
Color — Цвет маркировки маршрута
Длина Для пунктирных маршрутов, длины каждой пунктирной линии
Spacing — Для пунктирных маршрутов, интервала между тире