Сгенерируйте обнаружения от радиолокационных излучений
Система radarSensor object™ возвращает статистическую модель, чтобы сгенерировать обнаружения от радиолокационных излучений. Можно сгенерировать обнаружения от моностатического радара, бистатического радара и Электронных мер по поддержке (ESM). Можно использовать объект radarSensor в сценарии что перемещение моделей и стационарные платформы с помощью trackingScenario. Радарный датчик может моделировать действительные обнаружения с добавленным случайным шумом и также сгенерировать ложные сигнальные обнаружения. Кроме того, можно использовать этот объект создать вход к средствам отслеживания, таким как trackerGNN, trackerJPDA и trackerTOMHT.
Этот объект позволяет вам сконфигурировать радар сканирования. Радар сканирования изменяет угол взгляда между обновлениями путем продвижения механического и электронного положения луча с шагом углового промежутка, заданного в свойстве FieldOfView. Радар сканирует общую область в азимуте и повышении, заданном радарными пределами сканирования механического устройства, MechanicalScanLimits, и электронными пределами сканирования, ElectronicScanLimits. Если пределы сканирования для азимута или повышения устанавливаются к [0 0], то никакое сканирование не выполняется по тому измерению для того режима сканирования. Если максимальная механическая частота развертки для азимута или повышения обнуляется, то никакое механическое сканирование не выполняется по тому измерению.
Используя одно-экспоненциальный режим, радар вычисляет область значений и смещения повышения, вызванные распространением через тропосферу. Смещение области значений означает, что измеренные области значений больше, чем область значений угла обзора к цели. Смещение повышения означает, что измеренные повышения выше их истинных повышений. Смещения больше, когда путь угла обзора между радаром и целью проходит через более низкие высоты, потому что атмосфера является более толстой на этих высотах.
Сгенерировать радарные обнаружения:
Создайте объект radarSensor и установите его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
sensor = radarSensor(SensorIndex)sensor = radarSensor(SensorIndex,'No scanning')sensor = radarSensor(SensorIndex,'Raster')sensor = radarSensor(SensorIndex,'Rotator')sensor = radarSensor(SensorIndex,'Sector')sensor = radarSensor(___,Name,Value)sensor = radarSensor(SensorIndex)SensorIndex и значениями свойств по умолчанию.
sensor = radarSensor(SensorIndex,'No scanning')radarSensor, который смотрит вдоль радарного направления опорного направления антенны. Никакое механическое устройство или электронное сканирование не выполняются. Этот синтаксис устанавливает свойство ScanMode на 'No scanning'.
sensor = radarSensor(SensorIndex,'Raster')radarSensor, который механически сканирует растровый шаблон. Растровый промежуток составляет 90 ° в азимуте от-45 ° до +45 ° и в повышении от горизонта до на 10 ° выше горизонта. Смотрите Синтаксисы Удобства для свойств, установленных этим синтаксисом.
sensor = radarSensor(SensorIndex,'Rotator')radarSensor, который механически сканирует 360 ° в азимуте путем механического вращения антенны на постоянном уровне. Когда вы устанавливаете HasElevation на true, радарная антенна механически указывает на центр поля зрения повышения. Смотрите Синтаксисы Удобства для свойств, установленных этим синтаксисом.
sensor = radarSensor(SensorIndex,'Sector')radarSensor, который механически сканирует сектор азимута на 90 ° от-45 ° до +45 °. При установке HasElevation на true, указывает радарную антенну к центру поля зрения повышения. Можно изменить ScanMode на 'Electronic', чтобы электронно отсканировать тот же сектор азимута. В этом случае антенна механически не наклоняется на электронном сканировании сектора. Вместо этого лучи сложены электронно, чтобы обработать целое повышение, заполненное пределами сканирования на сингле, живут. Смотрите Синтаксисы Удобства для свойств, установленных этим синтаксисом.
sensor = radarSensor(___,Name,Value)radarSensor(1,'DetectionCoordinates','Sensor cartesian','MaxRange',200) создает радарный генератор обнаружения, который сообщает об обнаружениях в Декартовой системе координат датчика и имеет максимальную область значений обнаружения 200 метров. Если вы задаете индекс датчика с помощью свойства SensorIndex, можно не использовать вход SensorIndex.
dets = sensor(radarsigs,simTime)dets = sensor(radarsigs,txconfigs,simTime)dets
= sensor(___,ins,simTime)[dets,numDets,config]
= sensor(___)dets = sensor(radarsigs,simTime)dets, от радиолокационных излучений, radarsigs, в текущем времени симуляции, simTime. Датчик генерирует обнаружения на уровне, заданном свойством UpdateRate. Чтобы использовать этот синтаксис, установите свойство ScanMode на 'ESM' или 'bistatic'.
dets
= sensor(___,ins,simTime)ins. Информация о INS используется путем отслеживания и алгоритмы сплава, чтобы оценить целевые положения в кадре NED.
Чтобы использовать этот синтаксис, установите свойство HasINS на true.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Системный объект radarSensor может смоделировать три режима обнаружения: моностатические, бистатические, и электронные меры по поддержке (ESM) как показано в следующих фигурах.
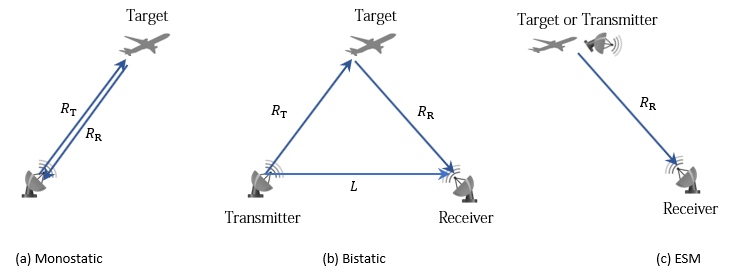
Для моностатического режима обнаружения передатчик и получатель расположены, как показано в фигуре (a). В этом режиме измерение области значений R может быть выражен как R = R T = R R, где R T и R R являются диапазонами от передатчика до цели и с цели на получатель, соответственно. В радарном датчике измерением области значений является R = c t/2, где c является скоростью света, и t является общим временем передачи сигнала. Кроме измерения области значений, моностатический датчик может также опционально сообщить об уровне области значений, азимуте и измерениях повышения цели.
Для бистатического режима обнаружения передатчик и получатель разделяются расстоянием L. Как показано в фигуре (b), сигнал испускается от передатчика, отраженного от цели, и в конечном счете полученного получателем. Бистатическое измерение области значений R b задано как R b = R T + R R − L. В радарном датчике бистатическое измерение области значений получено R b = c Δ t, где Δ t является разницей во времени между получателем, получающим прямой сигнал от передатчика и получающий отраженный сигнал от цели. Кроме бистатического измерения области значений, бистатический датчик может также опционально сообщить о бистатическом уровне области значений, азимуте и измерениях повышения цели. Поскольку бистатическая область значений и два угла переноса (азимут и повышение) не соответствуют тому же радиус-вектору, их нельзя объединить в радиус-вектор и сообщить в Декартовой системе координат. В результате об измерениях бистатического датчика можно только сообщить в сферической системе координат.
Для режима обнаружения ESM получатель может только получить сигнал, отраженный от цели или непосредственно испускаемый от передатчика, как показано в фигуре (c). Поэтому единственные доступные измерения являются азимутом и повышением цели или передатчика. Об этих измерениях можно только сообщить в сферической системе координат.
