Угловые измерения постоянной угловой скорости вращения прямоугольная цель
Задайте систему координат датчика путем определения sensorParameters входной параметр.
sensorPosition = [-5;10;0]; sensorOrientation = rotmat(quaternion([30 0 0],'eulerd','ZYX','frame'),'frame'); sensorParams = struct('Frame','Rectangular', ... 'OriginPosition',sensorPosition,... 'Orientation',sensorOrientation);
Задайте постоянное состояние угловой скорости вращения для прямоугольной цели.
state = [10;5;1.6;30;0.5;4.7;1.8];
Вычислите угловые положения в системе координат датчика.
corners = ctrectcorners(state,sensorParams);
Настройте среду визуализации с помощью theaterPlot.
% Create a theater plot. tp = theaterPlot; % Plot the state using a track plotter. statePlotter = trackPlotter(tp,'DisplayName','Target State'); % Plot the corners using a detection plotter. cornerPlotter = detectionPlotter(tp,'DisplayName','Corners');
Вычислите входные параметры и график.
targetPos = [state(1) state(2) 0]; targetOrientation = rotmat(quaternion([state(4) 0 0],'eulerd','ZYX','frame'),'frame'); targetDims = struct('Length',state(6),... 'Width',state(7),... 'Height',5,... 'OriginOffset',[0 0 0]); cornerPosGlobal = sensorOrientation*corners(:,:) + sensorPosition; statePlotter.plotTrack(targetPos,targetDims,targetOrientation); cornerPlotter.plotDetection(cornerPosGlobal');

states — Текущие прямоугольные целевые состоянияТекущие прямоугольные целевые состояния, заданные как 7 N матрицей с действительным знаком, где N является количеством состояний. Семь размерных прямоугольных состояний заданы как [x; y; s; θ; ω; L; W. Значение этих переменных и их модулей:
| Переменная | Значение | Модуль |
| x | Положение прямоугольника центрируется в направлении x | m |
| y | Положение прямоугольника центрируется в направлении y | m |
| s | Скорость в направляющемся направлении | m/s |
| θ | Угол ориентации прямоугольника относительно направления x | градус |
| ω | Угловая скорость вращения | degree/s |
| L | Длина прямоугольника | m |
| W | Ширина прямоугольника | m |
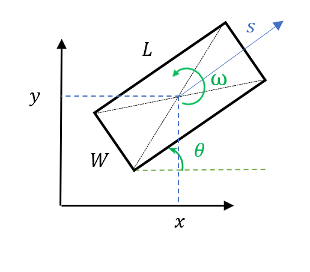
Пример: [1;2;2;30;1;4.7;1.8]
Типы данных: single | double
sensorParameters — Параметры для датчика преобразовывают функциюПараметры для датчика преобразовывают функцию, возвращенную как структура или массив структур. Если только необходимо преобразовать состояние однажды, задайте его как структуру. Если необходимо преобразовать времена n состояния, задайте его как n-by-1 массив структур. Например, чтобы преобразовать состояние из сценария структурируют к системе координат датчика, обычно необходимо сначала преобразовывать состояние из сценария прямоугольная система координат на платформу прямоугольная система координат, и затем преобразовывать состояние с платформы прямоугольная система координат к датчику сферическая система координат.
Поля структуры:
| Поле | Описание |
Frame | Тип системы координат координаты нижестоящего элемента, заданный как |
OriginPosition | Дочерняя позиция системы координат выражена в родительской системе координат, заданной как вектор 3 на 1. |
OriginVelocity | Дочерняя скорость системы координат выражается в родительской системе координат, заданной как вектор 3 на 1. |
Orientation | Относительная ориентация между системами координат, заданными как 3х3 матрица вращения. Если |
IsParentToChild | Отметьте, чтобы указать на направление вращения между родительской и дочерней системой координат, заданной как |
HasAzimuth | Указывает, содержат ли выходные параметры компоненты азимута, заданные как |
HasElevation | Указывает, содержат ли выходные параметры компоненты вертикального изменения, заданные как |
HasRange | Указывает, содержат ли выходные параметры компоненты области значений, заданные как |
HasVelocity | Указывает, содержат ли выходные параметры скоростные компоненты, заданные как |
Обратите внимание на то, что здесь система координат сценария является родительской системой координат системы координат платформы, и система координат платформы является родительской системой координат системы координат датчика.
Когда frame 'Rectangular', HasVelocity определяет, возвращено ли измерение в форме [x; y; z; v x; v y; v z] или [x; y; z.
Когда frame 'spherical', возвращенные измерения находятся в порядке [азимут, вертикальное изменение, область значений, уровень области значений]. Элементы возвращенных измерений определяются:
HasAzimuth — Определяет, содержит ли выведенный измерение азимута.
HasElevation — Определяет, содержит ли выведенный измерение вертикального изменения.
HasRange — Определяет, содержит ли выведенный измерение области значений.
HasVelocity — Определяет, содержит ли выведенный измерение уровня области значений при условии, что HasRange 'true'. Если HasRange 'false', возвращенное измерение не содержит уровень области значений (даже при том, что HasVelocity 'true').
Типы данных: struct
ctrect | ctrectjac | ctrectmeas | ctrectmeasjac | gmphd | initctrectgmphd | trackerPHD
