Перевод тела и датчик вращения
Первое поколение/Sensors & Actuators
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Body Sensor обнаруживает движение тела, представленного блоком Body. Вы соединяете Датчик Тела с системой координат (CS) Тела на Теле, движение которого вы хотите обнаружить. Датчик в частности измеряет движение источника этого CS Тела.
Датчик Тела измеряет компоненты поступательного и вращательного движения в любой комбинации:
Положение, скорость и ускоряющие векторы. Радиус-вектор имеет свой хвост в Мировом начале координат CS.
Матрица вращения, скорость вращения и ускоряющие векторы. Матрицы вращения выводятся как векторы-строки с девятью элементами, расположенные в порядке развертывания по столбцам.
В диалоговом окне блока вы выбираете систему координат привязки (CS) оси, в которых представлены эти компоненты.
Вход является портом коннектора, соединенным с обнаруживаемым Телом. Выходной порт является набором сигналов Simulink® или одним связанным Сигналом Simulink выбранных матричных и/или векторных компонентов.
Матрица вращения ориентации тела R связывает компоненты того же векторного v, как измерено в инерционном Мировом CS и в CS Тела v b = R T · v W. Вектор-столбец v W перечисляет три компонента векторного v, измеренные в Мировом CS. Вектор-столбец v b перечисляет три компонента векторного v, измеренные в CS Тела.
Столбцы матрицы вращения R являются компонентами модульных базисных векторов CS Тела, измеренных относительно Мировых осей.
Смотрите Представления Движения Тела и Представления Ориентации Тела для получения дополнительной информации о представлении положения тела и ориентации, матриц вращения и скорости вращения.
Блок Body Sensor может измерить положение и/или ориентацию тела. Это измеряет их относительно домашней настройки машины, состояние машины перед применением начальных приводов условия и блоком демонтированных соединений. Таким образом Датчик Тела включает эффект последних, которые действуют, прежде чем симуляция запускается.
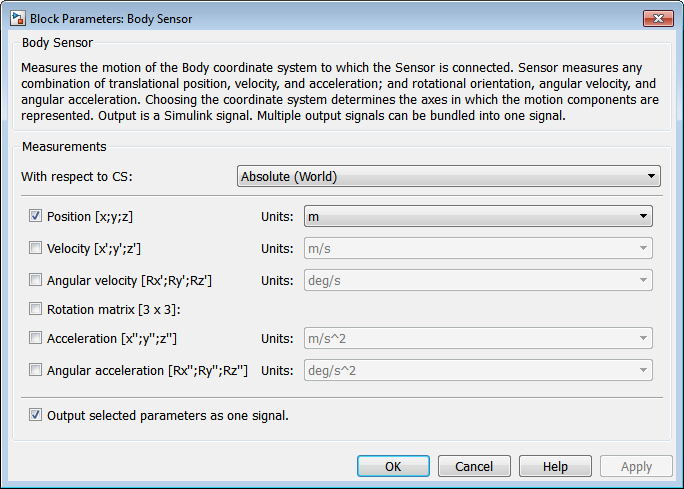
Диалоговое окно имеет одну активную область, Measurements.
В выпадающем меню выберите систему координат, в которой представлены компоненты движения тела: любой Local (Body CS) с которым Датчик соединяется или Absolute (World) по умолчанию.
В Absolute случаю, матрица вращения R и векторы движения представляли компоненты в инерционных Мировых осях CS. В Local случай, те же компоненты движения тела предварительно умножаются на обратную матрицу вращения ориентации тела R-1 = R T.
Каждое векторное измерение является вектором-строкой в выходном сигнале Simulink. Выбранные сигналы упорядочены в той же последовательности как диалоговое окно.
Установите флажок для каждого из возможных измерений, которые вы хотите сделать:
Поступательное движение: Position, Velocity и векторы Acceleration: r, v = dr/dt, и a = dv/dt, соответственно.
Вращательное движение: Angular velocity и векторы Angular acceleration и Rotation matrix:
Rotation matrix является 3х3 ортогональной матрицей вращения R:
представление вращательной ориентации и удовлетворение R TR = RR T = I. Компоненты выводятся по столбцам как вектор-строка с 9 компонентами: (R 11, R 21, R 31, R 12, ... ).
Если вы выбираете With respect to coordinate system в качестве Absolute (World), Rotation matrix измеряет вращательную ориентацию тела относительно Мирового CS. Вспомните отношение векторных компонентов в Мире и осях координат тела, v W = R · v b.
Если вы выбираете With respect to coordinate system в качестве Local (Body CS), Rotation matrix возвращает 3х3 единичную матрицу R TR = I.
Скорость вращения является ωj = (1/2) Σik ɛijkΩik, где матрица Ω = + (dR/dt)*RT =-R*(dRT/dt), и ɛ является символом сочетания. Угловое ускорение является α = dω/dt.
В выпадающих меню Units выберите модули для каждого из измерений, которые вы хотите:
Перевод: значениями по умолчанию является m (метры), m/s (метры/секунда) и m/s2 (meters/second2), соответственно, для Position, Velocity и Acceleration.
Вращение: значениями по умолчанию является deg/s (степени/секунда) и deg/s2 (degrees/second2), соответственно, для Angular velocity и Angular acceleration. Rotation matrix является безразмерным.
Установите этот флажок, чтобы преобразовать выходные сигналы в один связанный сигнал. Значение по умолчанию выбрано. Если вы очистите его, блок Body Sensor вырастит столько же выходных портов Simulink, сколько существуют активные выбранные сигналы, один порт для каждого выбранного сигнала.
Если флажок устанавливается, Сигнал Simulink имеет все активные (выбранные) сигналы, упорядоченные в вектор одной строки в том же порядке, который вы видите в диалоговом окне. Невыбранные компоненты удалены из векторного сигнала.
Датчик выходные параметры упорядочен и помечен можно следующим образом.
| Выходной сигнал датчика тела | Метка |
|---|---|
| Положение | p |
| Скорость | v |
| Скорость вращения | av |
| Матрица вращения | R |
| Ускорение | a |
| Скорость вращения | aa |
Вот Датчик Тела, соединенный с Телом:
Необходимо соединить Датчик Тела с Телом в одном из его портов Body CS. Датчик измеряет движение того CS Тела.
Body, Body Actuator, Constraint & Driver Sensor, Joint Sensor, Mechanical Branching Bar
Смотрите состояние Движения Кинематики и Машины, Представления Движения Тела и Представления Ориентации Тела для получения дополнительной информации о представлении положения тела и ориентации.
Смотрите распознающиеся движения и силы.
Смотрите соответствующие записи в Глоссарии об ориентации тела: вращение угла оси, Углы Эйлера, правило правой руки и матрица вращения.
