Соединение с пользовательской комбинацией призматических, вращательных, и сферических объединенных примитивов
Первое поколение / соединения
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Пользовательский Блок соединений является составным соединением, что можно настроить с заданной комбинацией примитивов (призматический, вращательный, или сферический) представление самых общих и неограниченных степеней свободы (число степеней свободы) в трех измерениях:
До трех поступательных чисел степеней свободы как три призматических примитива
До трех вращательных степеней свободы:
Как один сферический примитив
Как один, два, или три вращательных примитива
Смысл вращательных степеней свободы задан правилом правой руки. Одно сферическое или три revolutes вместе формируют предназначенную для правой руки систему.
Можно добавить, сконфигурировать и удалить эти примитивы из Пользовательского Соединения с минимумом и значением по умолчанию одного примитива. Свойства каждого примитива совпадают с отдельными Соединениями тех же имен.
Соединение с двумя или тремя вращательными примитивами становится сингулярным, если два или три из осей вращения становятся параллельными (“блокировка карданова подвеса”). Соединение с двумя или тремя призматическими примитивами становится сингулярным, если два или три из осей перевода становятся параллельными. Симуляция останавливается с ошибками в этих случаях.
Соединение с тремя вращательными примитивами должно быть сконфигурировано в начальном состоянии с тремя взаимно ортогональными осями вращательного примитива. Нет никаких ограничений на примитивные оси, если симуляция запускается, кроме препятствовать тому, чтобы любые две из примитивных осей стали параллельными.
Можно соединить блоки Привода и Датчика с Пользовательским Соединением с каждым Приводом и Датчиком, соединяющимся с отдельным примитивом. Вы не можете соединить Привод со сферическим примитивом.
Блок соединений представляет относительные степени свободы между двумя телами, не самими телами.
Необходимо соединить любой Блок соединений с двумя и только двумя блоками Тела, основой и последователем. Все Соединения имеют два порта коннектора для этих связей, задавая направление совместного движения (основа последователю). Вы соединяете каждую сторону Блока соединений с этими блоками Тела в порте системы координат (CS) Тела.
Вы задаете объединенные примитивные оси, если таковые имеются, в Объединенном диалоговом окне.
Этот Блок соединений собран и устанавливает ограничения для связанного CSS Тела.
Если Соединение не имеет никаких призматических примитивов, источники связанного CSS Тела по обе стороны от Соединения должны быть пространственно расположены точки, к в допусках блока.
Если Соединение имеет один или несколько призматических примитивов, источники связанного CSS Тела должны лечь в промежутке призматических осей:
| Количество призматических примитивов | Промежуток примитивных осей |
|---|---|
| Один | Вдоль примитивной оси |
| Два | В плоскости примитивных осей |
| Три | Где угодно в 3-мерном пространстве |
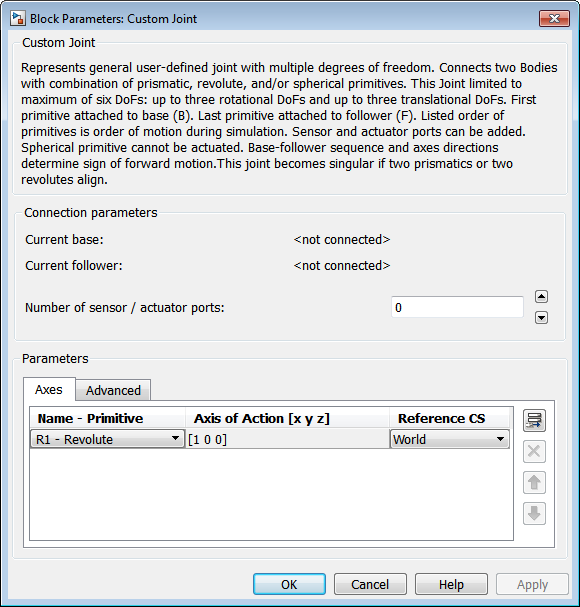
Диалоговое окно имеет две активных области, Connection parameters и Parameters.
Основа (B) - последовательность последователя (ф) Боди определяет смысл положительного движения:
Положительный перевод является последователем, перемещающимся в направлении оси перевода.
Положительное вращение является последователем, вращающимся в правиле правой руки об оси вращения.
Положительное вращение является последователем, вращающимся в правиле правой руки как показано фигурой движения на странице с описанием блока Spherical.
Когда вы соединяете основу (B) порт коннектора на Пользовательском Блоке соединений к Порту CS Тела на Теле, этот параметр автоматически сбрасывается к имени этого CS Тела. Смотрите следующую фигуру, Пользовательские Объединенные Порты Коннектора Тела Основы и Последователя.
Основное Тело автоматически соединяется с первым объединенным примитивом в примитивном списке в Параметрах.
Когда вы соединяете последователя (F) порт коннектора на Пользовательском Блоке соединений к Порту CS Тела на Теле, этот параметр автоматически сбрасывается к имени этого CS Тела. Смотрите следующую фигуру, Пользовательские Объединенные Порты Коннектора Тела Основы и Последователя.
Тело последователя автоматически соединяется с последним объединенным примитивом в примитивном списке в Параметрах.
Используя это меню счетчика, можно определить номер дополнительных портов коннектора, необходимых для соединения Объединенного Привода и Объединенных блоков Датчика к этому Соединению. Значением по умолчанию является 0. Сферический примитив не может быть соединен с Приводом.
Движение призматического примитива задано в линейных модулях. Движение вращательного примитива задано в угловых единицах. Движение сферического примитива является тремя числами степеней свободы, заданными в форме кватерниона.
Пользовательские объединенные порты коннектора тела основы и последователя
Переключитесь между вкладками Advanced и Axes.
Записи на вкладке Axes требуются. Каждая степень свободы, примитивная в Пользовательском Соединении, имеет строку ввода. Эти линии задают направление осей действия числа степеней свободы, которое представляет Пользовательское Соединение.
В выпадающем меню выберите метку и тип примитива для этой степени свободы. До трех призматических примитивов P1, P2, P3 позволены. Вращательные степени свободы представлены до трех вращательных примитивов: R1r2 , R3. Сферический примитивный S может взять все три позволенных вращательных степени свободы вместо этого.
Значением по умолчанию является R1 - Revolute.
Войдите здесь как трехкомпонентный вектор направленная ось, задающая позволенное движение этого примитива и его соответствующей степени свободы:
Призматический: ось перевода
Вращательный: ось вращения
Сферический: поле не активно
Вектором по умолчанию является [0 0 1]. Ось является направленным вектором, чей в целом подписывают вопросы.
Чтобы предотвратить сингулярность и ошибки симуляции, никакие две из вращательных осей и никакие две из призматических осей не могут быть параллельными.
Используя выпадающее меню, выберите систему координат (Мир, основной CS Тела или CS Тела последователя), относительно чьих осей координат векторная ось действия ориентирована. Этот CS также определяет абсолютное значение сил/крутящих моментов и движения вдоль/о объединенной оси. Значением по умолчанию является World.
Поле не активно для сферического примитива.
Пользовательские Объединенные средства управления списком примитивов, в фигуре, позволяют вам добавлять, переупорядочивать, и удалять объединенные примитивы в Пользовательском Блоке соединений.
Пользовательские объединенные средства управления списком примитивов
Добавить объединенный примитив в список примитивов:
Подсветите существующее примитивное имя в списке.
Нажмите на кнопку Add (см. предыдущую фигуру, Пользовательские Объединенные Средства управления Списком Примитивов).
Новый примитив сразу появится ниже примитива, который вы подсветили.
Сменить положение объединенного примитива в списке:
Подсветите примитив, положение которого вы хотите сменить.
Нажмите на кнопку Up или Down (см. предыдущую фигуру, Пользовательские Объединенные Средства управления Списком Примитивов), пока примитив не то, где вы хотите его.
Удалить объединенный примитив из списка:
Подсветите примитив, который вы хотите удалить.
Нажмите на кнопку Delete (см. предыдущую фигуру, Пользовательские Объединенные Средства управления Списком Примитивов).
Примитив, который вы подсветили, исчезает.
Пользовательское Соединение требует по крайней мере одного примитивного, который вы не можете удалить.

Вкладка Advanced является дополнительной. Вы используете его, чтобы управлять способом, которым симуляция Simscape Multibody интерпретирует топологию вашей принципиальной схемы.
В замкнутом цикле симуляция внутренне и автоматически сокращает одно и только одно соединение.
Если вы хотите, чтобы это конкретное соединение было взвешено предпочтительно для сокращения во время симуляции, установите флажок. Значение по умолчанию не выбрано.
Bushing, Gimbal, Joint Actuator, Joint Initial Condition Actuator, Joint Sensor, Joint Stiction Actuator, Prismatic, Revolute, Six-DoF, Spherical
Смотрите Степени свободы Моделирования для больше при представлении числа степеней свободы с Соединениями.
Смотрите Топологию Модели Проверки и Как работы Simscape Multibody Software для больше на замкнутых циклах и сокращении.
