Линейный и компоненты скорости вращения основы и систем координат тела последователя
Первое поколение/Constraints & Drivers

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Скоростной Блок драйверов управляет линейной комбинацией спроектированного поступательного и скоростями вращения двух Тел. Скорости спроектированы скалярными произведениями на постоянных векторах, которые вы задаете.
Индексы B и F относятся, чтобы базироваться и тела последователя, соответственно. Пусть
v B, v F быть двумя векторами скорости тела, измеренными в Мире.
ωB, ωF быть двумя векторами скорости вращения тела, измеренными в Мире.
c B, c F, d B, d F быть постоянными векторами.
Скоростной Блок драйверов задает линейную комбинацию Ω:
как функция времени f(t). Вы задаете векторы c B, c F, d B, d F. Вы также соединяете блок Driver Actuator со Скоростным Драйвером.
Входной сигнал Simulink® в Привод Драйвера задает зависящую от времени задающую функцию f(t) и его первые две производные, а также их модули. Если вы не приводите в движение Скоростной Драйвер, этот блок действия как независимое от времени ограничение, которое замораживает ограничительную линейную комбинацию в ее начальном значении Ω (t =0) во время симуляции.
Драйверы ограничивают относительные степени свободы (число степеней свободы) между парой тел как заданные функции времени. Локально в машине, они заменяют Соединение в качестве выражения числа степеней свободы. Глобально, Блоки драйверов должны произойти топологически в замкнутом цикле. Как Тела, соединенные с Соединением, эти два Тела соединились с, Драйверы упорядочены как основа и последователь, фиксируя направление относительного движения.
Можно также соединить Constraint & Driver Sensor с любым Блоком драйверов и измерить силы/крутящие моменты реакции между управляемыми телами.
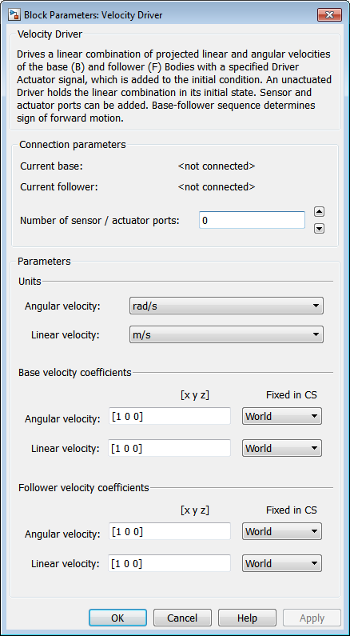
Диалоговое окно имеет две активных области, Connection parameters и Parameters.
Основа (B) - последовательность последователя (ф) Боди определяет смысл положительного движения. Положительный перевод является последователем, перемещающимся в направлении оси перевода. Положительное вращение является последователем, вращающимся в предназначенном для правой руки смысле об оси вращения.
Когда вы соединяете основу (B) порт коннектора на Скоростном Блоке драйверов к Порту CS Тела на Теле, этот параметр автоматически сбрасывается к имени этого CS Тела. Смотрите следующую фигуру, Скоростную Основу Драйвера и Порты Коннектора Тела Последователя.
Когда вы соединяете последователя (F) порт коннектора на Скоростном Блоке драйверов к Порту CS Тела на Теле, этот параметр автоматически сбрасывается к имени этого CS Тела. Смотрите следующую фигуру, Скоростную Основу Драйвера и Порты Коннектора Тела Последователя.
Используя это меню счетчика, можно определить номер дополнительных портов коннектора, необходимых для соединения Привода Драйвера и блоков Constraint & Driver Sensor к этому Драйверу. Значением по умолчанию является 0.
Чтобы активировать Драйвер, соедините Привод Драйвера.
Скоростная основа драйвера и порты коннектора тела последователя
Поля Parameters сгруппированы в три набора, Units, Base velocity coefficients и Follower velocity coefficients.
c векторов B, c F, d B, d F несет неявное модульное преобразование, чтобы преобразовать все скорости в общие линейные скоростные единицы f(t), который вы устанавливаете в Приводе Драйвера, соединенном со Скоростным Блоком драйверов.
Из выпадающего меню выберите общие модули для всех скоростей вращения. Значением по умолчанию является rad/s (радианы/секунда).
Векторы d B и d F неявно несут модульное преобразование длины/угла. f(t) задающей функции имеет линейные скоростные единицы, которые вы устанавливаете в блоке Driver Actuator, который вы соединяете со Скоростным Драйвером. Если модули f(t) отличаются от модульного набора в Linear velocity units в этом диалоговом окне, векторы, d B и d F неявно несут дополнительное модульное преобразование.
Из выпадающего меню выберите общие модули для всех линейных скоростей. Значением по умолчанию является m/s (метры/секунда).
f(t) задающей функции имеет линейные скоростные единицы, которые вы устанавливаете в блоке Driver Actuator, который вы соединяете со Скоростным Драйвером. Если модули f(t) отличаются от модульного набора здесь, векторы, c B и c F неявно несут модульное преобразование.
Под [x y z] введите векторы коэффициентов Angular velocity для основного Тела. Это компоненты d B. Значением по умолчанию является [1 0 0].
В выпадающем меню Fixed in CS выберите который набор осей координат, World или Base, задайте эти векторные коэффициенты. Значением по умолчанию является World.
Под [x y z] введите векторы коэффициентов Linear velocity для основного Тела. Это компоненты c B. Значением по умолчанию является [1 0 0].
В выпадающем меню Fixed in CS выберите который набор осей координат, World или Base, задайте эти векторные коэффициенты. Значением по умолчанию является World.
Под [x y z] введите вектор коэффициентов Angular velocity для Тела последователя. Это компоненты d F. Значением по умолчанию является [1 0 0].
В выпадающем меню Fixed in CS выберите который набор осей координат, World или Follower, задайте эти векторные коэффициенты. Значением по умолчанию является World.
Под [x y z] введите вектор коэффициентов Linear velocity для основного Тела. Это компоненты c F. Значением по умолчанию является [1 0 0].
В выпадающем меню Fixed in CS выберите который набор осей координат, World или Follower, задайте эти векторные коэффициенты. Значением по умолчанию является World.
Angle Driver, Constraint & Driver Sensor, Driver Actuator, Parallel Constraint
Смотрите Ограничение и Управление Степенями свободы для больше при ограничении числа степеней свободы с Драйверами.
Смотрите Топологию Модели Проверки и Как работы Simscape Multibody Software для больше при использовании драйверов в замкнутых циклах.
