Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Основные компоненты любого механизма являются его составляющими твердыми телами. Тело Simscape Multibody относится к любой точке или пространственно расширенному объекту, который имеет массу. Тела Simscape Multibody, в отличие от физических тел, не имейте степеней свободы. Библиотека Simscape Multibody Bodies содержит два блока для представления тел в модели Simulink®:
Земля
Моделирует точку на идеальном теле бесконечной массы и степени, которая служит фиксированной контрольной точкой для машин (см. Территорию Моделирования).
Тело
Твердые тела моделей конечной массы и степени, включая их присоединенные системы координат тела (см. Твердые тела Моделирования и Работу с Системами координат Тела).
Земля Simscape Multibody относится к телу бесконечной массы, которая действует и как система координат в покое для целой машины и как фиксированная основа для присоединения компонентов машины, например, заводской цех, в котором стоит робот. Наземные блоки Simscape Multibody позволяют вам представлять точки на земле в вашей машине. Это в свою очередь позволяет вам задать степени свободы, которые ваша система имеет относительно ее среды. Вы делаете это путем соединения Блоков соединений, представляющих степени свободы между блоками Тела, представляющими части машины и Наземных блоков, представляющих наземные точки.
Каждый блок Ground имеет один порт коннектора, с которым можно соединить Блок соединений, который может в свою очередь быть соединен с одним блоком Body. Каждый блок Ground поэтому позволяет вам представлять степени свободы между одной частью вашей машины и ее средой. Если вы хотите задать движение других частей вашей машины относительно среды, необходимо создать дополнительные Наземные блоки.
Каждая машина в модели Simscape Multibody должна содержать по крайней мере один блок Ground, соединенный с блоком Body через Блок соединений. Каждая подмашина, соединенная блоком Shared Environment, должна иметь по крайней мере одну Землю.
Один блок Ground в каждой машине вашей модели играет вторую роль, связь с блоком Machine Environment той машины, который устанавливает его механическую среду.
Точно один блок Ground в каждой машине в вашей модели должен быть соединен с блоком Machine Environment.
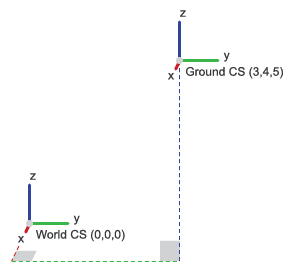
Ведущая система координат Simscape Multibody и система координат называются Миром. Вся территория находится в покое в Мире. Порт коннектора каждого блока Ground задает названный GND основанной системы координат. Оси системы координат GND параллельны Миру.
По умолчанию источник основанной системы координат совпадает с источником системы Мировой координаты. Поле Location диалогового окна блока Ground позволяет вам перемещать источник GND к некоторой другой точке в системе Мировой координаты, как в Модели в качестве примера и Симулировать Простую Машину.
Система координат GND позволяет вам задавать положения и движения частей вашей машины относительно фиксированных точек в среде машины. С переключенным источником GND остается в покое.
Блок Simscape Multibody Body позволяет вам смоделировать твердые тела конечной массы и степени. Тело твердо, если его внутренние детали не могут переместиться друг относительно друга.
Блок Body позволяет вам задавать следующие атрибуты твердого тела.
Массовые Свойства. Они включают массу тела, которая определяет ее ответ поступательным силам и ее тензор инерции, который определяет его ответ на вращательные крутящие моменты.
Системы координат тела. По умолчанию блок Body задает три системы локальной координаты, один сопоставленный с центром тяжести тела, пометил CG и двух других, пометил CS1 и CS2, соответственно, сопоставленными с двумя другими точками на теле, что можно задать. Можно создать дополнительные системы координат Тела или удалить их по мере необходимости.
Диалоговое окно блока Body позволяет вам задавать источник CS Тела (см. Установку Положения CS Тела), и ориентация (см. Установку Ориентации CS Тела). Источник и ориентация CS CG тела задают стартовое местоположение и ориентацию тела. Источники других систем координат Тела задают начальные местоположения других точек на теле.
Блок Body позволяет гибкость в определении источников и ориентаций систем координат Тела. Можно задать источник и ориентацию CS тела относительно
Мировой CS
Любой другой CS на том же теле
Смежный CS, CS на соседнем теле или земле, непосредственно соединенной Соединением, Ограничением или Драйвером к выбранному CS Тела, вы конфигурируете
Это упрощает создание и обслуживание моделей. Единственное ограничение - то, что необходимо задать источник и местоположение по крайней мере одной из систем координат Тела машины относительно Мирового CS.
Домашняя Настройка. Если вы вошли во все необходимые положения и ориентации в Тела вашей модели, ваша машина находится в своей домашней настройке. Скорости тела являются нулем, и любые демонтированные соединения остаются демонтированными.
Порты коннектора. Любой CS Тела может отобразить Порт CS Тела. Порт CS Тела позволяет вам присоединять Соединения, Приводы и Датчики к Телу. По умолчанию, CS1 Тела и системы координат CS2 каждое отображение порт Body CS. Можно отобразить порт для любой другой системы координат Тела также, включая CS CG Тела.
Создать блок Body,
Перетащите значок блока Body из библиотеки Simscape Multibody Bodies и бросьте ее в свое окно модели.
Откройте диалоговое окно блока Body.
Введите массу тела, которое вы моделируете в поле Mass.
Выберите единицы массы из смежного списка модулей.
Введите 3х3 матрицу, представляющую тензор инерции тела относительно его системы координат центра тяжести (CS CG) источник и оси в поле Inertia (см. Определение Тензоров Инерции для Общих Форм).
Войдите в исходные положения CG тела и систем координат во вкладке Position.
Введите начальную ориентацию CG тела и систем координат во вкладке Orientation.
Нажмите OK или Apply.
Следующая таблица позволяет вам определить тензоры инерции для некоторых общих форм. Для каждой формы массового m, таблица приводит основные моменты формы инерции, I 1, I 2, и I 3, вдоль x-, y- и z - оси системы координат CG формы.
| Форма | I1 | I2 | I3 |
|---|---|---|---|
| Тонкий стержень длины L, выровненный вдоль z | mL2/12 | mL2/12 | 0 |
| Сфера радиуса R | 2mR2/5 | 2mR2/5 | 2mR2/5 |
| Цилиндр радиуса R и высота h, выровненный вдоль z | (m/4)(R2 + h2/3) | (m/4)(R2 + h2/3) | mR2/2 |
| Прямоугольный parallelopiped сторон a, b и c, выровненный вдоль x, y, z, соответственно | (m/12)(b2 + c2) | (m/12)(a2 + c2) | (m/12)(a2 + b2) |
| Конус основного радиуса R и высота h вдоль z | (m/4)(3R2/5 + h2) | (m/4)(3R2/5 + h2) | 3mR2/10 |
| Эллипсоид полуосей a, b и c, выровненный вдоль x, y, z, соответственно | (m/5)(b2 + c2) | (m/5)(a2 + c2) | (m/5)(a2 + b2) |
Соответствующий тензор инерции для формы является следующей 3х3 матрицей:
Каждому телу Simscape Multibody присоединили системы координат Тела (CSS) к нему. Местоположение CS тела является источником того CS. Прямоугольные оси координат x-y-z CS вращаются при некоторой ориентации. Вы настраиваете источники CS тела и ориентации прежде, чем запустить вашу модель. Но если тела начинают перемещаться, источники и ориентации CSS тела остаются фиксированными в теле. Элементы тензора инерции тела также остаются фиксированными в теле.
Системы координат Органа по Управлению разделов и Порты CS Органа по Созданию объясняют, как создать пользовательские системы координат Тела и порты Body CS или удалить существующие порты.
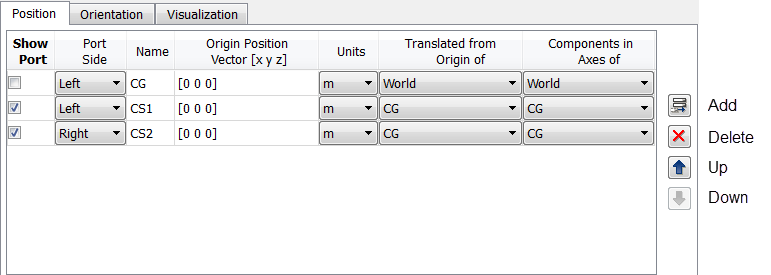
Вкладка Position диалогового окна блока Body позволяет вам задавать положение любой из систем локальной координаты тела.
Translated from Origin of и списки Components in Axes of во вкладке вместе задают, который другие из систем координат вашей машины вы используете в качестве контрольных точек и ориентаций, чтобы настроить системы координат тела, которое вы конфигурируете.
Задавать положение CS Тела,
Откройте диалоговое окно блока Body.
Вкладка Position диалогового окна перечисляет системы локальной координаты тела в таблице.
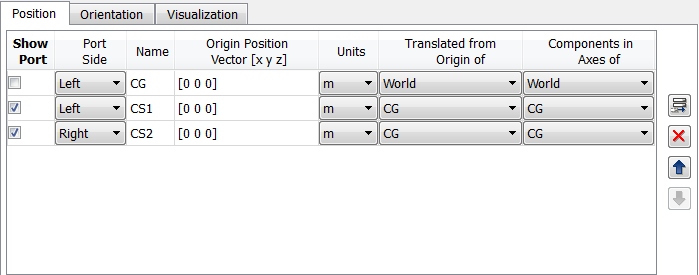
Каждая строка задает положение системы координат, заданной в столбце Name.
Выберите модули, в которых вы хотите задать источник CS Тела из списка Units CS.
Задайте системы координат привязки для CS Тела, т.е. системы координат, относительно которых вы хотите измерить источник CS Тела и ориентацию осей координат CS Тела. Выбором является Мир, смежный CS и другой CSS Тела на том же Теле.
Необходимо прямо или косвенно задать весь CSS Тела в отношении Земли или к Миру. Косвенная ссылка означает, что вы задаете CS Тела относительно другого CS и так далее в цепи ссылок, которая в конечном счете заканчивается в Земле или Мире.
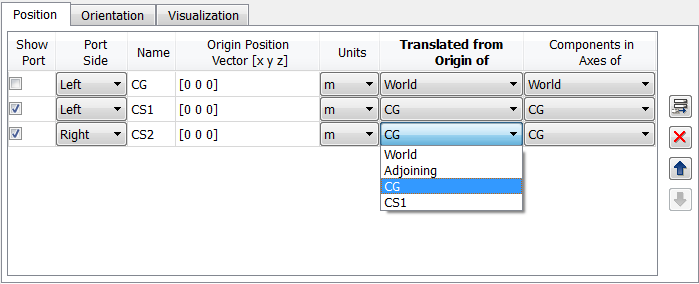
Вы делаете это путем выбора источника и ориентации CS спецификации от CS Тела Translated from Origin of и списки Components in Axes of, соответственно. Например, предположите, что вы хотите задать положение CS2 относительно другой системы координат, источник которой в начале координат CS1, но чьи оси идут параллельно тем из CS CG. Затем вы выбрали бы CS1 из списка Translated from Origin of CS2 и CG из списка Components in Axes of CS2.
Введите вектор, задающий местоположение CS Тела в поле Origin Position Vector [x y z] CS.
Компоненты вектора должны быть в модулях, которые вы выбрали и относительно системы координат, которую вы выбрали. Например, предположите, что вы выбрали m как модуль для определения источника и CS1 CS2 и Мира как CSS, задающий источник и ориентацию для CS2. Теперь предположите, что вы хотите задать местоположение CS2 как один метр справа от CS1 вдоль Мира ось x-. Затем вы ввели бы [1 0 0] как радиус-вектор CS2.
Нажмите Apply, чтобы принять, что установка положения или OK принимают установку и отклоняют диалоговое окно.
Вкладка Orientation диалогового окна блока Body позволяет вам задавать ориентацию любой из систем локальной координаты тела.
Задавать ориентацию CS Тела,
Откройте диалоговое окно блока Body.
Выберите вкладку Orientation диалогового окна.
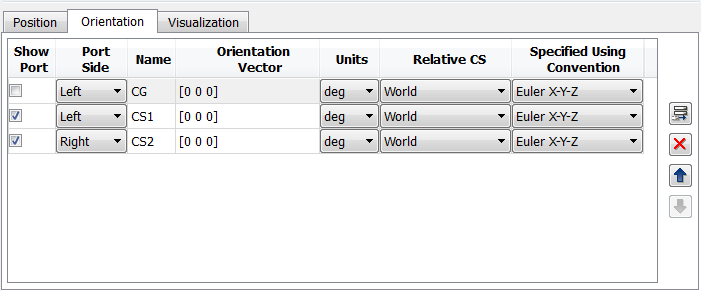
Выберите модули (степени или радианы), в котором вы хотите задать ориентацию CS из списка Units CS.
Выберите систему координат, относительно которой вы хотите задать ориентацию CS Тела от CS Тела список Relative CS. Выбором является Мир, смежный CS и другой CSS Тела на том же Теле.
Выберите соглашение, которое вы хотите использовать, чтобы задать ориентацию CS Тела из списка Specified Using Convention CS.
Введите вектор, который задает ориентацию CS Тела относительно CS, который вы выбираете с этой целью, согласно выбранному соглашению спецификации.
Нажмите Apply, чтобы принять, что установка ориентации или OK принимают установку и отклоняют диалоговое окно.
Необходимо будет часто изменять системы координат Тела по умолчанию блока Body. Вы можете хотеть соединить Тело больше чем с двумя Соединениями, в этом случае необходимо не только больше Придать форму CSS, но их порты Body CS также. Соединение Приводов и Датчиков к Телам требует порта Body CS и Body CS для каждой связи.
Вкладка систем координат Тела диалогового окна блока Body содержит строку кнопок, которые позволяют вам добавлять, удалять и переупорядочивать системы локальной координаты Тела.
Чтобы использовать эти кнопки, выберите Body CS в таблице CS и выборе
Delete, чтобы удалить выбранный CS из таблицы
Up, чтобы переместить запись CS одна строка в таблице CS
Down, чтобы переместить запись CS одна строка вниз в таблице CS
Выберите Add, чтобы добавить новый CS.
Чтобы добавить или удалить порт из значка блока Body, откройте диалоговое окно блока и выберите или снимите флажок CS's Show Port в таблице Body CS диалогового окна. Нажмите OK или Apply, чтобы подтвердить изменение.
