Механические параметры симуляции машины
Первое поколение / тела
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Machine Environment позволяет вам просматривать и изменять механические параметры среды для одной машины в вашей модели.
Модель Simscape Multibody состоит из одной или нескольких машин. Машина является полной, связанной схемой блоков Simscape Multibody, топологически отличных от других полных блок-схем Simscape Multibody. Каждая машина должна иметь один или несколько Наземных блоков.
Машина может быть составным объектом подмашин, соединенных блоками Общей среды. Каждая подмашина должна иметь один или несколько Наземных блоков.
Точно одна Земля на машину, простую или составную, должна быть соединена с блоком Machine Environment для вашей модели Simscape Multibody, чтобы быть допустимой.
Этот блок определяет следующие настройки для машины:
Как симулировать машину
Как интерпретировать механические ограничения
Как линеаризовать симуляцию
Ли и как отобразить машину в визуализации
Вы соединяете этот блок с Землей путем включения что порт Machine Environment Земли из Наземного диалогового окна.
Этот блок также позволяет вам вводить силу тяжести как переменный сигнал Simulink®. Если вы принимаете решение сделать это, импорт Simulink > также появляется на блоке для связи с трехкомпонентной линией Сигнала Simulink.
Можно открыть диалоговое окно Параметров конфигурации Simulink для просмотра и редактирования путем нажатия кнопки Configuration Parameters на нижнем левом углу диалогового окна блока.
В более низкой половине его диалогового окна блок Machine Environment имеет четыре активных вкладки, которые можно просмотреть и изменить после выбора соответствующих вкладок. Можно применить настройки в любое время путем нажатия на Apply или OK.
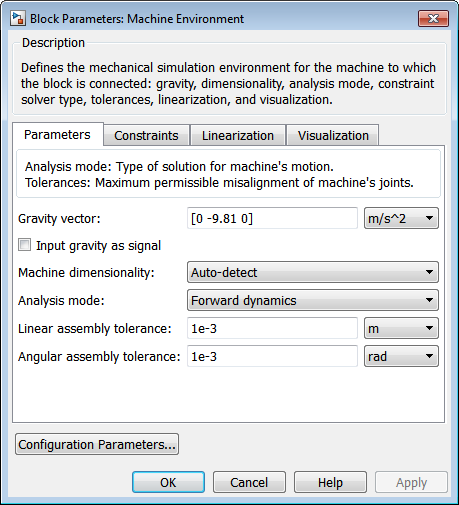
В этой вкладке вы конфигурируете настройки, которые управляют механической динамикой.
Значение этого параметра является вектором MATLAB®, который задает величину и направление гравитационного ускорения в системе мировой координаты модели. Это должен быть трехкомпонентный вектор. Вектором по умолчанию является [0 -9.81 0]. Это поле отключено, если вы принимаете решение ввести силу тяжести как сигнал.
Модулями по умолчанию является m/s2 (метры в квадратную секунду). Используйте выпадающее меню направо, если вы хотите сбросить модули.
Установите этот флажок, если вы хотите отключить поле Gravity vector и вместо этого ввести силу тяжести как переменный Сигнал Simulink. Значение по умолчанию не выбрано.
Если вы устанавливаете этот флажок, импорт Simulink появляется на блоке в дополнение к существующему порту Machine Environment. Вы вводите вектор силы тяжести как трехкомпонентный Сигнал Simulink к этому порту. Компонентами является, соответственно, x, y и z.
В выпадающем меню выберите в том, сколько размерностей вы хотите симулировать свою машину: в 3D Only или 2D Only, или позвольте симуляции Simscape Multibody выбрать для вас с Auto. Значением по умолчанию является 3D Only.
Необходимо заботиться, если вы выбираете 2D Only, то, что машина на самом деле перемещается только в две размерности. Если это не делает, симуляция останавливается с ошибкой.
Задает тип анализа, который будет выполняться во время симуляции. Выберите один из выпадающего меню.
| Аналитический режим | Описание |
|---|---|
Forward dynamics | Вычисляет положения и скорости тел системы, учитывая силы, крутящие моменты и начальные условия. Это - режим по умолчанию. |
Inverse dynamics | Вычисляет силы и закручивает требуемый произвести заданные движения открытой машины. |
Kinematics | Вычисляет силы и закручивает требуемый произвести заданные движения машины с обратной связью. |
Trimming | Вариант режима Forward Dynamics, который будет использоваться с |
Максимальная ошибка положения, позволенная между телами, соединенными призматическими соединениями. Значением по умолчанию является 1e-3 m. Используйте меню на праве установить модули.
Максимальная угловая погрешность, позволенная между телами, соединенными шарнирными соединениями. Значением по умолчанию является 1e-3 rad. Используйте меню на праве установить модули.
В этой вкладке вы говорите симуляцию Simscape Multibody, как интерпретировать механические ограничения в машинах, которые содержат блоки из библиотеки Constraints & Drivers; сократите Соединение, Ограничение и Блоки драйверов в замкнутых циклах; или оба.
Тип решателя раньше решал ограничения на состояния механической системы. Выберите один из выпадающего меню.
| Тип решателя | Описание |
|---|---|
Stabilizing | Добавляет самокорректирующийся термин к динамике, которая стабилизирует числовое решение так, чтобы это дрейфовало к ограничительному коллектору. Это значение по умолчанию. |
Tolerancing | Решает ограничения на состояния системы к заданной степени точности. |
Machine precision | Решает ограничения к числовой точности компьютера, на котором запускается симуляция. |
Относительный допуск, используемый tolerancing ограничительным решателем, чтобы определить, когда прекратить совершенствовать решение. Значением по умолчанию является 1e-4.
Enabled, только если Constraint solver type установлен в Tolerancing.
Абсолютный допуск, используемый tolerancing ограничительным решателем, чтобы определить, когда прекратить совершенствовать решение состояния машины. Значением по умолчанию является 1e-4.
Enabled, только если Constraint solver type установлен в Tolerancing.
Установите этот флажок, если вы хотите, чтобы Simulink сделал дополнительные шаги, чтобы обработать сингулярность в уравнениях системы движения. Значение по умолчанию не выбрано.
Эта опция увеличивает вычислительную стоимость решения уравнений системы движения, независимо от того, есть ли у них сингулярность. Выберите эту опцию только как последнее прибежище, т.е. только если решатели Simulink не могут в противном случае решить уравнения системы движения или потребовать, чтобы чрезмерно долгое время сделало так.
Выберите Specify tolerance в этом выпадающем меню, если вы хотите управлять, как точно симуляция Simscape Multibody отличает ограничения. Значением по умолчанию является Automatically select tolerance.
Эта опция важна, если у вас есть два или больше ограничения, которые вводят почти идентичные ограничения на движение вашей машины. Больше ограничений означает меньше степеней свободы.
Если два или больше ограничения являются почти тем же самым, симуляция устраняет один или несколько из них как избыточный.
Если ограничения достаточно отличаются, симуляция обрабатывает их как независимые ограничения.
Выбор Specify tolerance включает поле Relative tolerance.
Относительный допуск избыточного ограничительного анализа, который реализует симуляция. Это поле включено, только если вы выбираете Specify tolerance в выпадающем меню Redundant constraint tolerancing. Значением по умолчанию является 1e-14.
Создание этого больше допуска означает, что симуляция обрабатывает подобные ограничения как то же самое, т.е. избыточный.
Создание этого меньшего допуска означает, что симуляция обрабатывает подобные ограничения как отличные, т.е. не избыточная.
В этой вкладке вы говорите симуляцию, как линеаризовать вашу машину.
Задает тип возмущения состояния, используемого linmod линеаризовать машину. Значением по умолчанию является Fixed.
Adaptive повторно вычисляет размер возмущения, используемого на каждом шаге в процессе линеаризации, чтобы гарантировать точный расчет коэффициентов линеаризации. Это запускается с записи в поле Perturbation size как исходное предположение.
Fixed использует размер возмущения, заданный в поле Perturbation size для каждого шага.
Задает относительный размер возмущения, используемого Fixed perturbation опция. Задает относительный размер возмущения исходного предположения, используемого Adaptive тип возмущения. Размер возмущения относительно размера встревоженного состояния. Значением по умолчанию является 1e-5.
В этой вкладке вы определяете, отображает ли визуализация Simscape Multibody эту машину, и выберите геометрию тела по умолчанию (поверхностная форма) и цвет для всех Тел в подключенной машине.
Машина наследовала значения по умолчанию всей модели для геометрии тела и цвета. Но можно изменить эти значения по умолчанию всей машины, чтобы отличаться от значений по умолчанию всей модели.
Установите этот флажок, если вы хотите машину, к которой этот блок соединяется, чтобы появиться в окне визуализации. Значение по умолчанию выбрано.
Из выпадающего меню выберите геометрию тела по умолчанию всей машины.
Use model default body geometries (значение по умолчанию)
Convex hull from Body CS locations для выпуклых оболочек
Equivalent ellipsoid from mass properties для эквивалентных эллипсоидов
Из выпадающего меню выберите, использовать ли значение по умолчанию всей модели в цвете всех Тел в этой машине (значение по умолчанию), или задавать значение по умолчанию всей машины, отличающееся от значения по умолчанию всей модели.
Если вы выбираете Specify в выпадающем меню Body color selection mode можно задать телесный цвет по умолчанию всей машины в поле. Вы задаете значения RGB согласно Графике MATLAB ColorSpec.
Значением по умолчанию является [1 0 0].
Body, Ground, Shared Environment
Смотрите соответствующие записи в Глоссарии: ограничение, динамика, земля, кинематика, машина, ограничение точности машины, стабилизируя ограничение и tolerancing ограничение.
Для больше о моделях Simscape Multibody и машинах, смотрите Машины Представления с Моделями. Для больше об использовании Территории и создании допустимых моделей Simscape Multibody, смотрите Территорию Моделирования и Тела и Проверку Механических Моделей. Для больше о моделировании ограничений, смотрите Ограничение и Управление Степенями свободы.
Для больше о конфигурировании визуализации для симуляции, смотрите Стартовую Визуализацию и Симуляцию.
Для больше о под управлением программном обеспечении Simscape Multibody с Simulink, см. Модели Simscape Multibody Конфигурирования в Simulink, Настройках Машины через Блок Среды Машины и Конфигурировании Методов Решения.
Для больше о конфигурировании моделирования в Simulink, консультируйтесь с разделом по диалоговому окну Параметров конфигурации в документации Simulink.
