Создайте массив кватерниона
Кватернион является гиперкомплексным числом с четырьмя частями, используемым в 3D вращениях и ориентациях.
Номер кватерниона представлен в форме , где a, b, c и части d являются вещественными числами и i, j, и k являются базисными элементами, удовлетворяя уравнению: i2 = j2 = k2 = ijk = −1.
Набор кватернионов, обозначенных H, задан в четырехмерном векторном пространстве по вещественным числам, R4. Каждый элемент H имеет уникальное представление на основе линейной комбинации базисных элементов, i, j, и k.
Все вращения в 3-D могут быть описаны осью вращения и угла о той оси. Преимущество кватернионов по матрицам вращения состоит в том, что ось и угол вращения легко интерпретировать. Например, рассмотрите вопрос в R3. Чтобы вращать точку, вы задаете ось вращения и угол вращения.
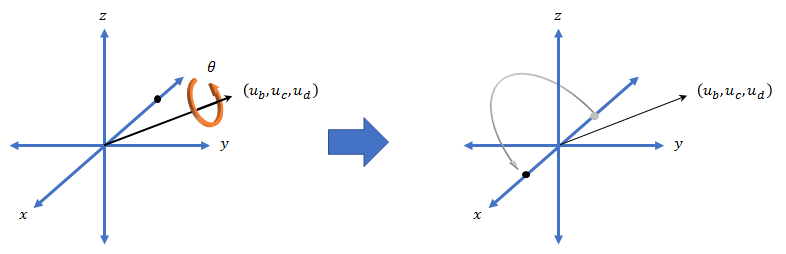
Представление кватерниона вращения может быть выражено как , где θ является углом вращения и [ub, uc, и ud] является осью вращения.
quat = quaternion()
quat = quaternion(A,B,C,D)ABC, и D. Все входные параметры должны иметь тот же размер и быть совпадающего типа данных.
quat = quaternion(matrix)
quat = quaternion(RV,'rotvec')RV. Каждая строка RV представляет вектор вращения в радианах.
quat = quaternion(RV,'rotvecd')RV. Каждая строка RV представляет вектор вращения в градусах.
A,B,C,D — Части кватернионаЧасти кватерниона, заданного как четыре разделенных от запятой скаляра, матрицы или многомерные массивы, одного размера.
Пример: quat = quaternion(1,2,3,4) создает кватернион формы 1 + 2i + 3j + 4k.
Пример: quat = quaternion([1,5],[2,6],[3,7],[4,8]) создает 1 2 массив кватерниона где quat(1,1) = 1 + 2i + 3j + 4k и quat(1,2) = 5 + 6i + 7j + 8k
Типы данных: single | double
matrix — Матрица частей кватернионаМатрица частей кватерниона, заданных как N-by-4 матрица. Каждая строка представляет отдельный кватернион. Каждый столбец представляет отдельную часть кватерниона.
Пример: quat = quaternion(rand(10,4)) создает массив кватерниона 10 на 1.
Типы данных: single | double
RV — Матрица векторов вращенияМатрица векторов вращения, заданных как N-by-3 матрица. Каждая строка RV представляет [X Y Z] элементы вектора вращения. Вектор вращения является единичным вектором, представляющим ось вращения, масштабируемого углом вращения в радианах или степенях.
Чтобы использовать этот синтаксис, задайте первый аргумент как матрицу векторов вращения и второго аргумента как 'rotvec' или 'rotvecd'.
Пример: quat = quaternion(rand(10,3),'rotvec') создает массив кватерниона 10 на 1.
Типы данных: single | double
RM — Матрицы вращенияМассив матриц вращения, заданных 3х3 матрицей или 3 3 N массивом. Каждая страница массива представляет отдельную матрицу вращения.
Пример: quat = кватернион (rand (3), 'rotmat', 'точка')
Пример: quat = кватернион (rand (3), 'rotmat', 'система координат')
Типы данных: single | double
PF — Тип матрицы вращения'point' | 'frame'Тип матрицы вращения, заданной 'point' или 'frame'.
Пример: quat = кватернион (rand (3), 'rotmat', 'точка')
Пример: quat = кватернион (rand (3), 'rotmat', 'система координат')
Типы данных: char | string
E — Матрица Углов ЭйлераМатрица Углов Эйлера, заданных N-by-3 матрица. При использовании 'euler' синтаксис, задайте E в радианах. При использовании 'eulerd' синтаксис, задайте E в градусах.
Пример: quat = кватернион (E, 'Эйлер', 'YZY', 'точка')
Пример: quat = кватернион (E, 'Эйлер', 'XYZ', 'система координат')
Типы данных: single | double
RS — Последовательность вращенияПоследовательность вращения, заданная как трехэлементный вектор символов:
'YZY'
'YXY'
'ZYZ'
'ZXZ'
'XYX'
'XZX'
'XYZ'
'YZX'
'ZXY'
'XZY'
'ZYX'
'YXZ'
Примите, что вы хотите определить новые координаты точки, когда ее система координат вращается с помощью вращения системы координат. Точка задана в системе исходной координаты как:
point = [sqrt(2)/2,sqrt(2)/2,0];
Вы хотите вращать точку с помощью представления Угла Эйлера [45,45,0]. Вращайте точку с помощью двух различных последовательностей вращения:
Если вы создаете вращающее устройство кватерниона и задаете последовательность 'ZYX', система координат сначала вращается 45 ° вокруг z - ось, то 45 ° вокруг нового y - ось.
quatRotator = quaternion([45,45,0],'eulerd','ZYX','frame'); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate =
0.7071 -0.0000 0.7071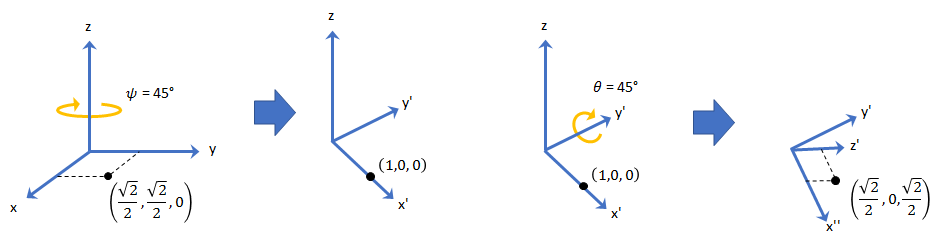
Если вы создаете вращающее устройство кватерниона и задаете последовательность 'YZX', система координат сначала вращается 45 ° вокруг y - ось, то 45 ° вокруг нового z - ось.
quatRotator = quaternion([45,45,0],'eulerd','YZX','frame'); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate =
0.8536 0.1464 0.5000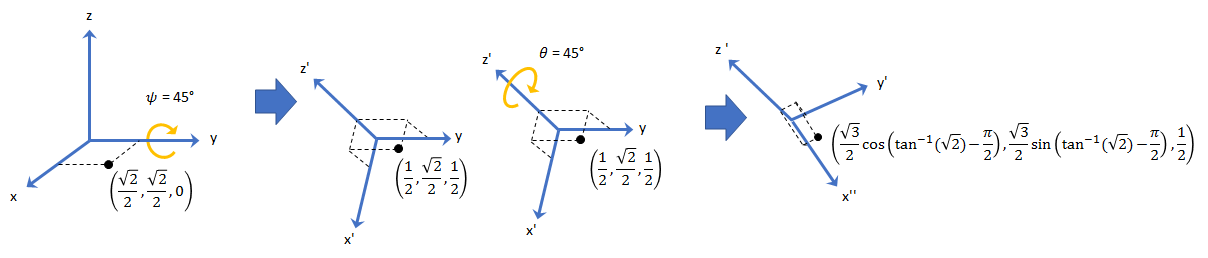
Типы данных: char | string
classUnderlying | Класс частей в кватернионе |
compact | Преобразуйте массив кватерниона в матрицу N-4 |
conj | Сопряженное комплексное число кватерниона |
ctranspose | Комплексное сопряженное транспонирование массива кватерниона |
dist | Угловое расстояние в радианах |
euler | Преобразуйте кватернион в Углы Эйлера (радианы) |
eulerd | Преобразуйте кватернион в Углы Эйлера (степени) |
exp | Экспоненциал массива кватерниона |
log | Натуральный логарифм массива кватерниона |
meanrot | Среднее вращение кватерниона |
minus, - | Вычитание кватерниона |
mtimes, * | Умножение кватерниона |
norm | Норма кватерниона |
normalize | Нормализация кватерниона |
ones | Создайте массив кватерниона с набором действительных частей одному и обнуленным мнимым частям |
parts | Извлеките части кватерниона |
power, .^ | Поэлементная степень кватерниона |
prod | Продукт массива кватерниона |
randrot | Равномерно распределенные случайные вращения |
rotateframe | Вращение системы координат кватерниона |
rotatepoint | Вращение точки кватерниона |
rotmat | Преобразуйте кватернион в матрицу вращения |
rotvec | Преобразуйте кватернион в вектор вращения (радианы) |
rotvecd | Преобразуйте кватернион в вектор вращения (степени) |
slerp | Сферическая линейная интерполяция |
times, .* | Поэлементное умножение кватерниона |
rdivide, ./ | Поэлементное правое деление кватерниона |
ldivide, .\ | Поэлементное левое деление кватерниона |
transpose | Транспонируйте массив кватерниона |
uminus, - | Кватернион, унарный минус |
zeros | Создайте массив кватерниона со всеми обнуленными частями |
