Пакет: vision.labeler.loading
Суперклассы: vision.labeler.loading.MultiSignalSource
Загрузите сигналы из rosbag источников в приложение Ground Truth Labeler
vision.labeler.loading.RosbagSource класс создает интерфейс для загрузки сигналов из rosbag файлов в приложение Ground Truth Labeler. В диалоговом окне Add/Remove Signal приложения, когда Source Type установлен в Rosbag, этот класс управляет параметрами в том диалоговом окне.
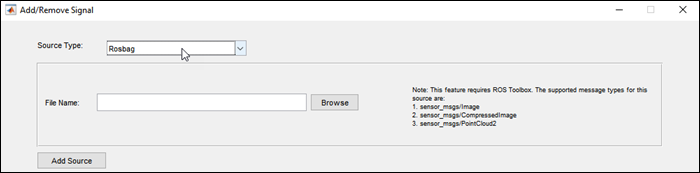
Чтобы получить доступ к этому диалоговому окну, в приложении, выбирают Open> Add Signals.
Реализация по умолчанию этого класса загружает сигналы от этих типов сообщений ROS:
sensor_msgs/Image
sensor_msgs/CompressedImage
sensor_msgs/PointCloud2
Этот класс требует ROS Toolbox.
vision.labeler.loading.RosbagSource классом является handle класс.
Когда вы экспортируете метки от сеанса приложения Ground Truth Labeler, который содержит rosbag источники, экспортируемый groundTruthMultisignal экземпляры объектно-ориентированной памяти этого класса в его DataSource свойство.
Создать RosbagSource возразите программно, такой, программно создав groundTruthMultisignal объект, используйте vision.labeler.loading.RosbagSource функция (описанный здесь).
rosbagSource = vision.labeler.loading.RosbagSourceRosbagSource объект для загрузки сигналов от rosbag источников данных. Чтобы задать источник данных и параметры, требуемые загружать источник, используйте loadSource метод.
Вы можете этот класс как начальная точка для создания пользовательского класса загрузки источника данных. Чтобы просмотреть исходный код для этого класса, используйте эту команду:
edit vision.labeler.loading.RosbagSource