Пометьте достоверные данные для автоматизированных ведущих приложений
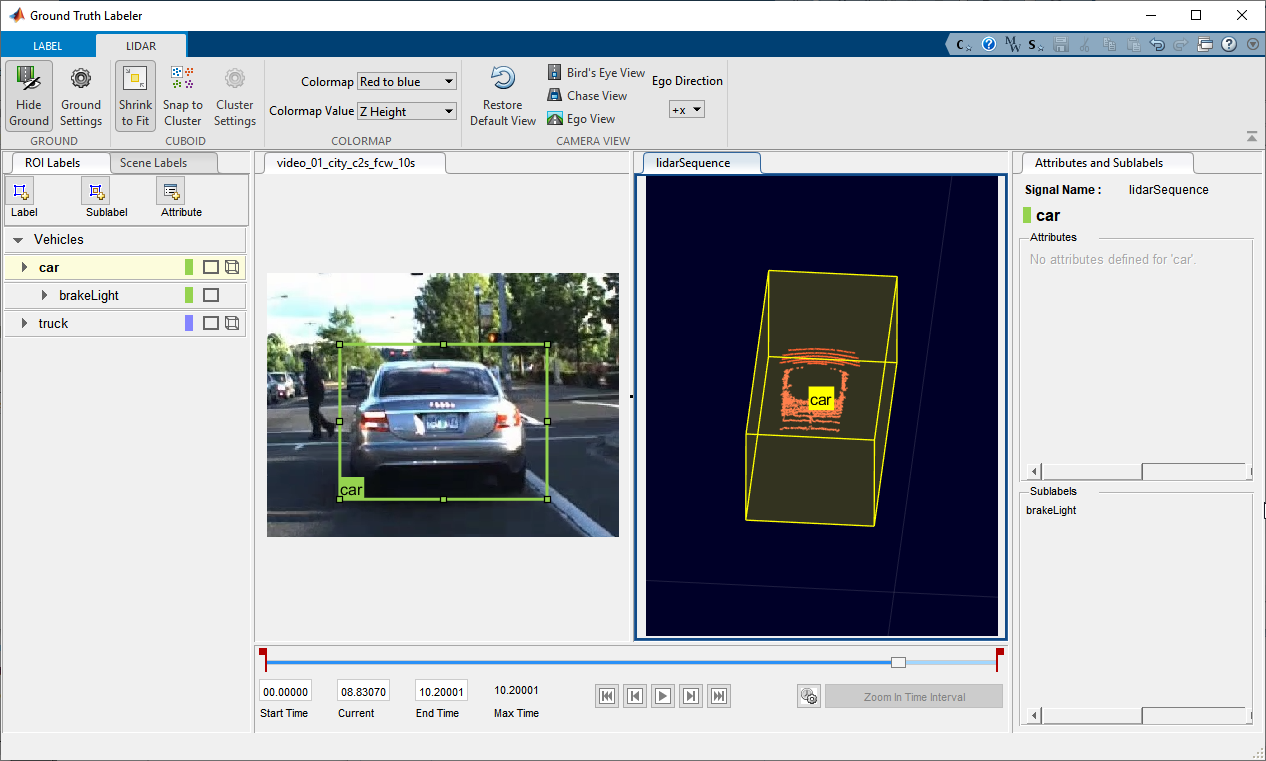
Приложение Ground Truth Labeler позволяет вам интерактивно помечать достоверные данные в нескольких видео, последовательностях изображений или облаках точек лидара. Используя приложение, вы можете:
Метка Simultaneously несколько перекрытых временем сигналов, представляющих ту же сцену.
Задайте прямоугольные метки видимой области (ROI), метки ROI ломаной линии, пиксельные метки ROI, метки ROI кубоида для маркировки лидара и определения метки сцены. Используйте эти метки, чтобы интерактивно помечать ваши достоверные данные.
Используйте встроенные алгоритмы обнаружения или отслеживания, чтобы пометить достоверные данные.
Запишите, импортируйте и используйте пользовательские алгоритмы автоматизации, чтобы автоматически пометить достоверные данные.
Оцените производительность своих алгоритмов автоматизации метки при помощи визуальных сводных данных.
Экспортируйте метки основной истины как groundTruthMultisignal объект. Можно использовать этот объект в системной верификации или в обучении сеть семантической сегментации или детектор объектов.
Отобразите синхронизируемые со временем сигналы, такие как данные о шине CAN, при помощи driving.connector.Connector API.
Чтобы узнать больше об этом приложении, смотрите Начало работы с Ground Truth Labeler.
MATLAB® Toolstrip: На вкладке Apps, под Automotive, кликают по значку приложения.
Командная строка MATLAB: Введите groundTruthLabeler.
Сигналы лидара не поддерживают линию или пиксельные метки ROI.
Пиксель и метки ROI кубоида не поддерживают подметки или атрибуты.
Окно Label Summary не поддерживает подметки или атрибуты
На левой стороне приложения панель ROI Labels содержит определения метки видимой области (ROI), которые можно отметить на системах координат. Можно создать определения метки непосредственно из этой панели. В качестве альтернативы можно создать определения метки программно при помощи labelDefinitionCreatorMultisignal возразите и затем импортируйте эти определения метки в сеанс приложения.
Поддержки приложений определение меток ROI, подметок и атрибутов.
ROI label является меткой, которая соответствует видимой области (ROI) в системе координат сигнала. Таблица описывает поддерживаемые типы метки.
| Метка ROI | Описание | Пример: управление сценой |
|---|---|---|
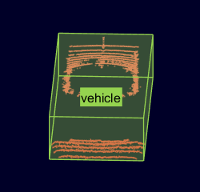
Rectangle/Cuboid | Чертите прямоугольные или кубовидные метки ROI вокруг объектов, в зависимости от типа сигнала.
| Транспортные средства, пешеходы, дорожные знаки
|
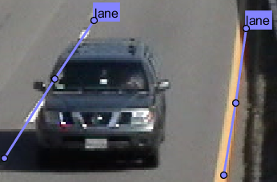
Line | Чертите линейные метки ROI, чтобы представлять линии. Чтобы чертить полилинейный ROI, используйте две или больше точки. | Контуры маршрута, ограждения, дорожные ограничения
|
Pixel label | Присвойте метки пикселям для семантической сегментации. Можно пометить пиксели вручную с помощью многоугольников, кистей или заливки. Для больше на пиксельной маркировке, смотрите, Маркируют Pixels for Semantic Segmentation (Computer Vision Toolbox). | Транспортные средства, дорожное покрытие, деревья, тротуар
|
ROI sublabel является меткой ROI, которая принадлежит родительской метке. Используйте подметки ROI, чтобы обеспечить больший уровень детализации о ROI в ваших помеченных достоверных данных. Например, метка vehicle может содержать headlight, licensePlate и подметки wheel. Можно создать подметки только для прямоугольных и полилинейных меток. Для получения дополнительной информации о подметках, смотрите Подметки Использования и Атрибуты, чтобы Маркировать Ground Truth Data (Computer Vision Toolbox).
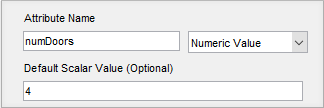
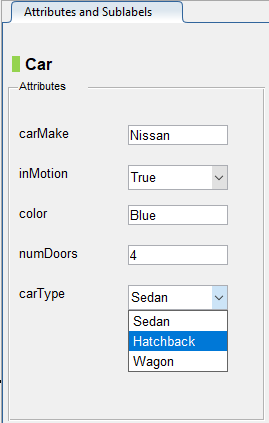
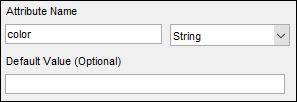
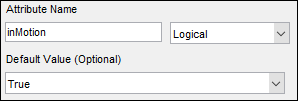
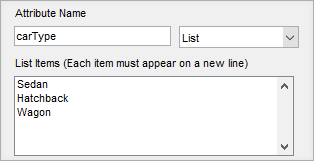
ROI attribute указывает дополнительную информацию о метке ROI или подметке. Например, в ведущей сцене, атрибуты могут включать тип или цвет транспортного средства. Таблица описывает поддерживаемые типы атрибута.
| Припишите тип | Демонстрационное определение атрибута | Демонстрационные значения по умолчанию |
|---|---|---|
|
|
|
|
| |
|
| |
|
|
Для получения дополнительной информации об атрибутах, смотрите Подметки Использования и Атрибуты, чтобы Маркировать Ground Truth Data (Computer Vision Toolbox).
Чтобы избежать необходимости повторно помечать основную истину новыми метками, организуйте схему маркировки, которую вы хотите использовать прежде, чем отметить вашу основную истину.
Можно скопировать и вставить метки между сигналами, которые имеют тот же тип.
driving.connector.Connector | vision.labeler.AutomationAlgorithm | vision.labeler.loading.MultiSignalSource | vision.labeler.mixin.Temporal