Прежде, чем сконфигурировать модель, завершитесь, процедура в Конфигурируют Сеть EtherCAT при помощи TwinCAT 3.
Сконфигурировать модель slrt_ex_ethercat_beckhoff_aio для выполнения при помощи целевого компьютера как главный узел завершитесь, процедура в Конфигурируют Блок EtherCAT Init.
Прежде чем вы будете использовать блок EtherCAT Init, будете конфигурировать сеть EtherCAT® с TwinCAT® 3.
Прежде чем вы запустите эту процедуру, ознакомите себя с TwinCAT 3 и его документацией.
Как часть процесса настройки, создайте и сохраните файл Информации о сети EtherCAT (ENI). Смотрите Конфигурируют Сеть EtherCAT при помощи TwinCAT 3.
Включать EtherCAT распределило часы, когда PTP включен для модели, используйте режим сдвига шины EtherCAT.
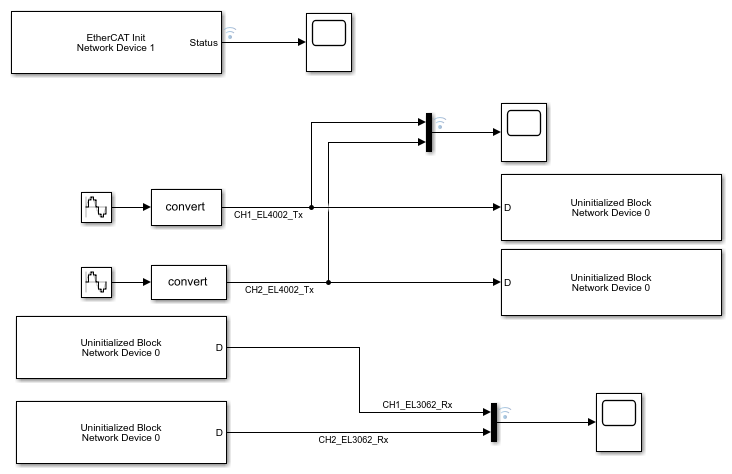
Сконфигурировать блок EtherCAT Init модели slrt_ex_ethercat_beckhoff_aio:
Открытая модель slrt_ex_ethercat_beckhoff_aioВ Командном Окне MATLAB введите:
open_system(fullfile(matlabroot, 'toolbox', 'slrealtime',... 'examples', 'slrt_ex_ethercat_beckhoff_aio'))
Дважды кликните блок EtherCAT Init.
В текстовом поле Config file (ENI) просмотрите к файлу Информации о сети EtherCAT (ENI), который вы создали, когда вы сконфигурировали сеть (здесь, 'BeckhoffAIOconfig.xml'). Можно ввести имя файла с или без одинарных кавычек.
Используйте значение по умолчанию 0 для параметра Device index.
Если модель включает больше чем одну сеть EtherCAT, введите уникальный Device index для каждой сети. Введите то же значение для всех блоков в каждой сети.
Введите Ethernet Port Number для порта EtherCAT, который вы соединяете со своей сетью EtherCAT. Смотрите Установку Сеть EtherCAT для Выполнения.
Возьмите значение по умолчанию Large model для параметра DC Tuning.
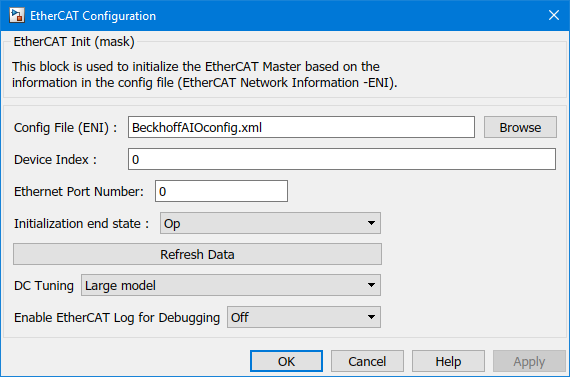
Чтобы обновить данные в блоке EtherCAT Init и распространить его с другими блоками EtherCAT, нажмите Refresh Data.
Нажмите OK.
Прежде, чем начать эту процедуру, вы, должно быть, выбрали допустимый файл ENI в блоке EtherCAT Init.
Прежде чем вы запустите эту процедуру, ознакомите себя с TwinCAT 3 и его документацией.
Сконфигурировать блоки EtherCAT PDO Receive модели slrt_ex_ethercat_beckhoff_aio:
Дважды кликните блок EtherCAT PDO Receive пометил EtherCAT PDO Receive.
Установите параметр Device Index на набор значений в блоке EtherCAT Init.
Из списка Signal Name выберите переменную, здесь Term 2 (EL3062).AI Standard Channel 1.Value.
Наблюдайте значение в секундах параметра Sample Time.
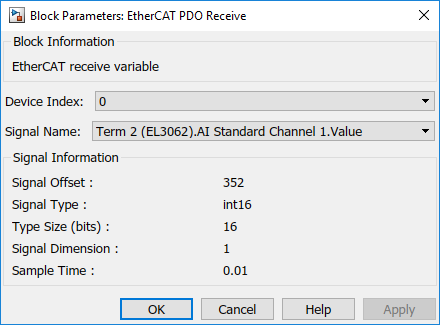
Нажмите OK.
Выполнитесь шаги 1-5 для блока EtherCAT PDO Receive пометили EtherCAT PDO Receive 1.
Прежде, чем начать эту процедуру, вы, должно быть, выбрали допустимый файл ENI в блоке EtherCAT Init.
Прежде чем вы запустите эту процедуру, ознакомите себя с TwinCAT 3 и его документацией.
Сконфигурировать блоки EtherCAT PDO Transmit модели slrt_ex_ethercat_beckhoff_aio:
Открытая модель slrt_ex_ethercat_beckhoff_aio.
Дважды кликните блок EtherCAT PDO Transmit пометил EtherCAT PDO Transmit.
Установите параметр Device Index на набор значений в блоке EtherCAT Init.
Выберите переменную Signal Name, здесь Term 3 (EL4002).AO Outputs Channel 1.Analog output.
Наблюдайте значение в секундах параметра Sample Time.
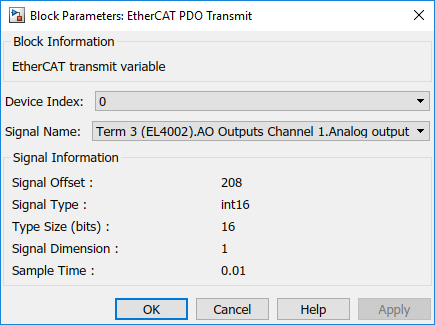
Нажмите OK.
Выполнитесь шаги 2-6 для блока EtherCAT PDO Transmit пометили EtherCAT PDO Transmit 1.
Прежде, чем начать эту процедуру, вы, должно быть, выбрали допустимый файл ENI в блоке EtherCAT Init. Для получения дополнительной информации смотрите Деривацию Размера Фиксированного Шага.
Сконфигурировать параметры конфигурации для модели slrt_ex_ethercat_beckhoff_aio:
Открытая модель slrt_ex_ethercat_beckhoff_aio.
Вычислите наибольший общий делитель (GCD) значений Sample Time для задач EtherCAT и для всех исходных блоков в модели. В этом случае GCD является 0.010.
В Редакторе Simulink®, на вкладке Real-Time, от раздела Prepare, нажимают Hardware Settings. Выберите Configuration Parameters> Solver.
Установите параметр Type на Fixed-step и Fixed-step size (fundamental sample time) к одному из следующего:
Интегральный делитель значения GCD, в секундах.
auto, если все другие исходные блоки в модели задали шаги расчета.
В этом случае установите параметр на 0.010.
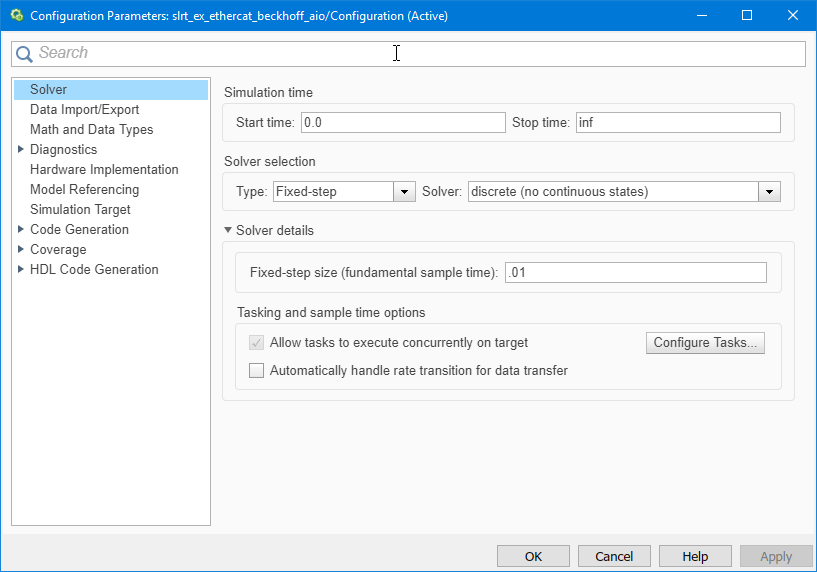
Нажмите OK.
Следующие задачи создают, загрузка и выполнение модели главного узла EtherCAT.
