Добавьте дорожную сеть в ведущий сценарий
roadNetwork( дороги импорта из файла дорожной сети OpenDRIVE® в ведущий сценарий. Эта функция поддерживает версию 1.4H [1] спецификации формата OpenDRIVE. scenario,'OpenDRIVE',filename)
roadNetwork( использует пару "имя-значение" scenario,'OpenDRIVE','ShowLaneTypes',showLaneTypes)'ShowLaneTypes' чтобы также импортировать маршрут вводят информацию из файла и отобразить его в ведущем сценарии.
roadNetwork( дороги импорта от API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) [2] дорожная сеть в ведущий сценарий. Функция импортирует дороги, которые являются самыми близкими к координатам широты и долготы, заданным в scenario,'ZenrinJapanMap',lat,lon)lat и lon, соответственно.
Импорт дорог от API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) данные требует пакета поддержки Средство импорта Automated Driving Toolbox™ для API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) Сервис. Для получения информации об установке пакетов поддержки смотрите, Получают и Управляют Дополнениями.
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Импортируйте дорожную сеть OpenDRIVE в сценарий.
filePath = 'intersection.xodr'; roadNetwork(scenario,'OpenDRIVE',filePath);
Постройте сценарий и увеличьте масштаб дорожной сети путем установления пределов осей.
plot(scenario) xlim([350 800]) ylim([1400 2000]) zlim([0.00 10.00])

Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Импортируйте ОПЕНДРАЙВ-Роуд, состоявшую из управления и парковки маршрутов в сценарий. По умолчанию функция интерпретирует информацию о типе маршрута и импортирует маршруты в ведущий сценарий, не изменяя тип маршрута.
filePath = 'parking.xodr'; roadNetwork(scenario,'OpenDRIVE',filePath);
Постройте сценарий.
plot(scenario) zoom(2) legend('Driving lane','Parking lane')

Импортируйте ОПЕНДРАЙВ-Роуд в сценарий. Установите 'ShowLaneTypes' значение к false подавить несколько типов маршрута. Функция игнорирует информацию о типе маршрута и импортирует все маршруты как ведущие маршруты.
scenario = drivingScenario; roadNetwork(scenario,'OpenDRIVE',filePath,'ShowLaneTypes',false); plot(scenario) zoom(2)

Импортируйте данные о дорожной сети HERE HDLM, которые являются самыми близкими к координатам заданного ведущего маршрута в ведущий сценарий. Постройте транспортное средство после этого маршрута в ведущем сценарии.
Загрузите последовательность географических координат, которые соответствуют ведущему маршруту.
data = load('geoSequence.mat');
lat = data.latitude;
lon = data.longitude;
Отобразите маршрут путем потоковой передачи координат на географическом проигрывателе. Установите уровень изменения масштаба на 14 и сконфигурируйте проигрыватель, чтобы отобразить все точки в его истории. Чтобы ускорить потоковую передачу, постройте только каждую десятую координату в маршруте.
zoomLevel = 14; player = geoplayer(lat(1),lon(1),zoomLevel,'HistoryDepth',Inf); timestep = 10; for i = 1:timestep:length(lat) plotPosition(player,lat(i),lon(i)); end

Создайте ведущий сценарий. Импортируйте данные о дороге HERE HDLM, которые являются самыми близкими к ведущему маршруту в сценарий.
scenario = drivingScenario;
roadNetwork(scenario,'HEREHDLiveMap',lat,lon);
Используйте latlon2localGeoReference свойство сценария. Источник является первой координатой, заданной в ведущем маршруте. Поскольку ведущий маршрут содержит только широтные и продольные данные, установите высоту на 0.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Добавьте транспортное средство в ведущий сценарий. Задайте конвертированный ведущий маршрут как траекторию транспортного средства. Установите скорость транспортного средства 30 метров в секунду.
v = vehicle(scenario,'ClassID',1);
speed = 30;
smoothTrajectory(v,[xEast,yNorth,zUp],speed);
Постройте сценарий и сделайте паузу каждую 0.01 секунды, чтобы замедлить симуляцию. Чтобы обеспечить то же выравнивание с географическими координатными отображениями, Ось X находится на нижней части, и Ось Y слева. В ведущих сценариях, не импортированных из карт, Ось X слева, и Ось Y находится на нижней части. Это выравнивание сопоставимо с системой мировой координаты Automated Driving Toolbox™.
После нескольких секунд транспортное средство, кажется, управляет под дорогой. Эта проблема происходит, потому что конвертированная траектория не содержит высотных данных, но импортированная дорожная сеть делает. Чтобы избежать этой проблемы, если вы задаете ведущий маршрут, зарегистрированный от GPS, включают высотные данные.
plot(scenario) while advance(scenario) pause(0.01) end

Импортируйте данные о дорожной сети HERE HDLM в ведущий сценарий. Выберите эти данные из области, которая сосредоточена вокруг заданной географической координаты.
Задайте координаты широты и долготы, соответствующие кольцу.
latCenter = 42.302324; lonCenter = -71.384970;
Задайте минимальные и максимальные широтные и продольные координаты для прямоугольной области вокруг кольца. Отобразите ограничительную рамку, соответствующую этой области на географическом графике.
offset = 5e-4; minLat = latCenter - offset; minLon = lonCenter - offset; maxLat = latCenter + offset; maxLon = lonCenter + offset; gx = geoaxes; LineSpec = '.-k'; geoplot(gx, ... [minLat maxLat],[minLon minLon],LineSpec, ... [maxLat maxLat],[minLon maxLon],LineSpec, ... [maxLat minLat],[maxLon maxLon],LineSpec, ... [minLat minLat],[maxLon minLon],LineSpec)

Создайте ведущий сценарий и импортируйте дороги из области при помощи минимальных и максимальных координат. roadNetwork функционируйте импортирует дороги, которые являются, по крайней мере, частично в этой области.
scenario = drivingScenario;
roadNetwork(scenario,'HEREHDLiveMap',minLat,minLon,maxLat,maxLon);Постройте сценарий. Чтобы обеспечить то же выравнивание с географическими координатными отображениями, Ось X находится на нижней части, и Ось Y слева. В ведущих сценариях, не импортированных из карт, Ось X слева, и Ось Y находится на нижней части. Это выравнивание сопоставимо с системой мировой координаты Automated Driving Toolbox™.
plot(scenario)

Импортируйте дороги из веб-сервиса OpenStreetMap® в ведущий сценарий. Затем постройте транспортное средство после маршрута в импортированной дорожной сети.
Импортируйте дорожную сеть кампуса MathWorks® Apple Hill в пустой ведущий сценарий. Файл был загружен с https://www.openstreetmap.org, который обеспечивает доступ к полученным толпой данным о карте во всем мире. Данные лицензируются под Открытыми Данными палата общин Открытая Лицензия Базы данных (ODbL), https://opendatacommons.org/licenses/odbl/.
Постройте импортированную дорожную сеть. Чтобы обеспечить то же выравнивание с географическими координатными отображениями, Ось X находится на нижней части, и Ось Y слева. В ведущих сценариях, не импортированных из карт, Ось X слева, и Ось Y находится на нижней части. Это выравнивание сопоставимо с системой мировой координаты Automated Driving Toolbox™.
scenario = drivingScenario; roadNetwork(scenario,'OpenStreetMap','applehill.osm'); plot(scenario)

Загрузите координаты широты и долготы для ведущего маршрута в этой дорожной сети.
data = load('geoRouteAH.mat');
lat = data.latitude;
lon = data.longitude;
Используйте latlon2localGeoReference свойство сценария. Источник является первой координатой, заданной в ведущем маршруте. Поскольку ведущий маршрут содержит только широтные и продольные данные, установите высоту на 0.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Добавьте транспортное средство в ведущий сценарий. Задайте конвертированный ведущий маршрут как траекторию транспортного средства. Установите скорость транспортного средства 30 метров в секунду. Постройте траекторию транспортного средства и сделайте паузу каждую 0.01 секунды, чтобы замедлить симуляцию.
v = vehicle(scenario,'ClassID',1); speed = 30; smoothTrajectory(v,[xEast,yNorth,zUp],speed); while advance(scenario) pause(0.01) end

Импортируйте Карту 3.0 Японии Zenrin (Itsumo NAVI API 3.0) данные о дорожной сети, которые являются самыми близкими к координатам заданного ведущего маршрута в ведущий сценарий. Постройте транспортное средство после этого маршрута в ведущем сценарии.
Загрузите последовательность географических координат, которые соответствуют ведущему маршруту.
data = load('tokyoSequence.mat');
lat = data.latitude;
lon = data.longitude;Отобразите маршрут путем потоковой передачи координат на географическом проигрывателе. Установите уровень изменения масштаба на 17 и сконфигурируйте проигрыватель, чтобы отобразить все точки в его истории. Чтобы ускорить потоковую передачу, постройте только каждую десятую координату в маршруте.
zoomLevel = 17; player = geoplayer(lat(1),lon(1),zoomLevel,'HistoryDepth',Inf); timestep = 10; for i = 1:timestep:length(lat) plotPosition(player,lat(i),lon(i)); end

Создайте ведущий сценарий. Импортируйте Карту 3.0 Японии Zenrin (Itsumo NAVI API 3.0) данные о дороге, которые являются самыми близкими к ведущему маршруту в сценарий.
scenario = drivingScenario;
roadNetwork(scenario,'ZenrinJapanMap',lat,lon)Используйте latlon2local функционируйте, чтобы преобразовать ведущий маршрут от географических координат до локальных Декартовых координат "восточного севера" (ENU), используемых в ведущем сценарии. Для источника системы координат ENU используйте географический источник дорожной сети, сохраненный в GeoReference свойство сценария. Источник является первой координатой, заданной в ведущем маршруте.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Добавьте транспортное средство в ведущий сценарий. Задайте конвертированный ведущий маршрут как траекторию транспортного средства. Установите скорость транспортного средства 30 метров в секунду.
v = vehicle(scenario,'ClassID',1);
speed = 30;
smoothTrajectory(v,[xEast,yNorth,zUp],speed);Постройте сценарий и сделайте паузу каждую 0.01 секунды, чтобы замедлить симуляцию. Чтобы обеспечить то же выравнивание с географическими координатными отображениями, Ось X находится на нижней части, и Ось Y слева. В ведущих сценариях, не импортированных из карт, Ось X слева, и Ось Y находится на нижней части. Это выравнивание сопоставимо с системой мировой координаты Automated Driving Toolbox™.
figure plot(scenario) while advance(scenario) pause(0.01) end

Импортируйте Карту 3.0 Японии Zenrin (Itsumo NAVI API 3.0) данные о дорожной сети в ведущий сценарий. Выберите эти данные из области, которая сосредоточена вокруг заданной географической координаты.
Задайте координаты широты и долготы, соответствующие парку.
latCenter = 35.6889; lonCenter = 139.8458;
Задайте минимальные и максимальные координаты широты и долготы для прямоугольной области вокруг парка. Отобразите ограничительную рамку, соответствующую этой области на географическом графике.
offset = 0.0013; minLat = latCenter - offset; minLon = lonCenter - offset; maxLat = latCenter + offset; maxLon = lonCenter + offset; figure gx = geoaxes; LineSpec = '.-k'; geoplot(gx, ... [minLat maxLat],[minLon minLon],LineSpec, ... [maxLat maxLat],[minLon maxLon],LineSpec, ... [maxLat minLat],[maxLon maxLon],LineSpec, ... [minLat minLat],[maxLon minLon],LineSpec)

Создайте ведущий сценарий и импортируйте дороги из области при помощи минимальных и максимальных координат. roadNetwork функционируйте импортирует дороги, которые являются, по крайней мере, частично в этой области.
scenario = drivingScenario;
roadNetwork(scenario,'ZenrinJapanMap',minLat,minLon,maxLat,maxLon) Постройте сценарий. Чтобы обеспечить то же выравнивание с географическими координатными отображениями, Ось X находится на нижней части, и Ось Y слева. В ведущих сценариях, не импортированных из карт, Ось X слева, и Ось Y находится на нижней части. Это выравнивание сопоставимо с системой мировой координаты Automated Driving Toolbox™.
figure plot(scenario)

scenario — Ведущий сценарийdrivingScenario объектВедущий сценарий в виде drivingScenario объект. scenario не должен содержать ранее созданные или импортированные дороги.
filename — Имя файла дорожной сетиИмя файла дорожной сети в виде вектора символов или строкового скаляра.
filename должен задать файл в текущей папке, файл, который находится на пути поиска файлов MATLAB® или полном или относительном пути к файлу.
filename должен закончиться расширением файла, которое допустимо для источника дорожной сети.
| Источник дорожной сети | Расширения правильного файла | Демонстрационный синтаксис |
|---|---|---|
| OpenDRIVE |
|
roadNetwork(scenario, ... 'OpenDRIVE','C:\Desktop\roads.xodr' |
| OpenStreetMap |
|
roadNetwork(scenario, ... 'OpenStreetMap','C:\Desktop\map.osm' |
showLaneTypes — Импортируйте информацию о типе маршрутаtrue или 1 (значение по умолчанию) | false или 0Импортируйте информацию о типе маршрута из файла дорожной сети OpenDRIVE и отобразите его в ведущем сценарии в виде разделенной запятой пары, состоящей из 'ShowLaneTypes' и одно из этих значений:
true или 1 — информация о типе маршрута Импорта и типы маршрута рендеринга.
false или 0 — Проигнорируйте информацию о типе маршрута и импортируйте все маршруты как ведущие маршруты в ведущем сценарии.
Таблица суммировала поддерживаемые типы маршрута и их внешний вид по умолчанию после импорта их в ведущий сценарий.
| Поддерживаемые типы маршрута | Описание | Внешний вид по умолчанию |
| Ведущие маршруты | Маршруты для управления |
|
| Ограничьте маршруты | Маршруты на дорожных границах |
|
| Ограниченные маршруты | Маршруты зарезервированы для многоместных транспортных средств |
|
| Маршруты плеча | Маршруты зарезервированы для чрезвычайной остановки |
|
| Парковка маршрутов | Маршруты вместе с ведущими маршрутами, предназначенными для парковки транспортных средств |
|
Любые другие неподдерживаемые типы маршрута представляются как маршруты границы.
Пример: 'ShowLaneTypes',false
lat — Координаты широтыШирота координирует в виде вектора из элементов в области значений [–90, 90]. lat должен быть одного размера с lon. Модули в градусах.
lon — Координаты долготыДолгота координирует в виде вектора из элементов в области значений [–180, 180]. lon должен быть одного размера с lat. Модули в градусах.
minLat — Минимальная координата широты ограничительной рамкиМинимальная координата широты ограничительной рамки в виде скаляра в области значений [–90, 90]. minLat должен быть меньше maxLat. Модули в градусах.
roadNetwork функционируйте импортирует любые дороги, которые являются, по крайней мере, частично в ограничительной рамке, заданной входными параметрами minLat, minLon, maxLat, и maxLon. Эта схема отображает отношение между этими координатами.
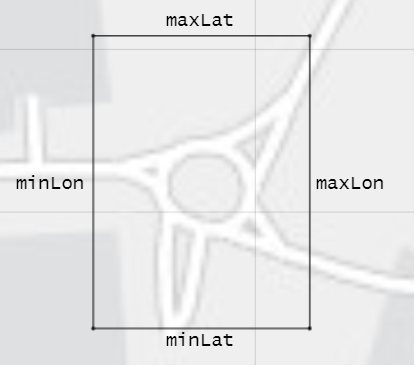
minLon — Минимальная координата долготы ограничительной рамкиМинимальная координата долготы ограничительной рамки в виде скаляра в области значений [–180, 180]. minLon должен быть меньше maxLon. Модули в градусах.
roadNetwork функционируйте импортирует любые дороги, которые являются, по крайней мере, частично в ограничительной рамке, заданной входными параметрами minLat, minLon, maxLat, и maxLon. Эта схема отображает отношение между этими координатами.
maxLat — Максимальная координата широты ограничительной рамкиМаксимальная координата широты ограничительной рамки в виде скаляра в области значений [–90, 90]. maxLat должен быть больше minLat. Модули в градусах.
roadNetwork функционируйте импортирует любые дороги, которые являются, по крайней мере, частично в ограничительной рамке, заданной входными параметрами minLat, minLon, maxLat, и maxLon. Эта схема отображает отношение между этими координатами.
maxLon — Максимальная координата долготы ограничительной рамкиМаксимальная координата долготы ограничительной рамки в виде скаляра в области значений [–180, 180]. maxLon должен быть больше minLon. Модули в градусах.
roadNetwork функционируйте импортирует любые дороги, которые являются, по крайней мере, частично в ограничительной рамке, заданной входными параметрами minLat, minLon, maxLat, и maxLon. Эта схема отображает отношение между этими координатами.
Ограничения импорта OpenDRIVE
Можно импортировать только маршруты, информацию о типе маршрута и дороги. Импорт дорожных объектов и сигналов трафика не поддерживается.
Файлы OpenDRIVE, содержащие большие дорожные сети, могут взять до нескольких минут, чтобы загрузить. Примеры больших дорожных сетей включают единицы, которые моделируют дороги города или единиц с дорогами, которые являются тысячами метров долго.
Маршруты с переменными ширинами не поддерживаются. Ширина установлена в самую высокую ширину, найденную в том маршруте. Например, если маршрут имеет ширину, которая варьируется от 2 метров до 4 метров, функция устанавливает ширину маршрута на 4 метра повсюду.
Дороги с маршрутом вводят информацию, указанную как driving'Граница' , restricted, shoulder, и parking поддерживаются. Маршруты с любой другой информацией о типе маршрута импортируются как маршруты границы.
Дороги с несколькими стилями маркировки маршрута не поддерживаются. Функция применяет первую найденную маркировку стиля ко всем маршрутам на дороге. Например, если дорога имеет Dashed и Solid маркировки маршрута, функция применяет Dashed маркировки маршрута повсюду.
Маршрут, отмечающий стили Bott Dots, Curbs, и Grass не поддерживаются. Маршруты с этими стилями маркировки импортируются как не отмеченные.
HD HERE живые ограничения импорта карты
Импорт дорог HERE HDLM с маршрутами различных ширин не поддерживается. В сгенерированной дорожной сети каждый маршрут собирается найти максимальную ширину вдоль ее целой длины. Рассмотрите маршрут HERE HDLM с шириной, которая варьируется от 2 до 4 метров вдоль ее длины. В сгенерированной дорожной сети ширина маршрута составляет 4 метра вдоль своей целой длины. Эта модификация к дорожным сетям может иногда заставлять дороги перекрываться в ведущем сценарии.
Если вы получаете предупреждение, что геометрия дороги не может быть вычисленной, то искривление дороги слишком резко для нее, чтобы представить правильно, и она не импортируется.
Некоторые проблемы с импортированными дорогами могут произойти из-за пропавших без вести или неточных данных о карте в сервисе HERE HDLM. Например, вы можете видеть черные линии, где дороги и соединения встречаются. Чтобы проверять где основы проблемы от в данных о карте, используйте HD HERE Живой Map Viewer, чтобы просмотреть геометрию дорожной сети HERE HDLM. Это средство просмотра требует допустимой лицензии HERE. Для получения дополнительной информации смотрите веб-сайт HERE Technologies.
Ограничения импорта OpenStreetMap
При импортировании данных OpenStreetMap дорога и функции маршрута имеют эти ограничения:
Информация об уровне маршрута не импортируется из дорог OpenStreetMap. Технические требования маршрута базируются только на направлении перемещения, заданного в дорожной сети OpenStreetMap, где:
Односторонние дороги импортируются как однополосные дороги с техническими требованиями маршрута по умолчанию. Эти маршруты программно эквивалентны lanespec(1).
Двухсторонние дороги импортируются как дороги 2D маршрута с двунаправленным перемещением и техническими требованиями маршрута по умолчанию. Эти маршруты программно эквивалентны lanespec([1 1]).
Таблица показывает эти различия в дорожной сети OpenStreetMap и дорожной сети в импортированном ведущем сценарии.
| Дорожная сеть OpenStreetMap | Импортированный ведущий сценарий |
|---|---|
|
|
Когда импорт дорожных сетей OpenStreetMap, которые задают данные о вертикальном изменении, если данные о вертикальном изменении не заданы для всех импортируемых дорог, то сгенерированная дорожная сеть может содержать погрешности и некоторые дороги, может перекрыться.
Основная карта, используемая в приложении, может иметь незначительные различия от карты, используемой в сервисе OpenStreetMap. Некоторые импортированные дорожные проблемы могут также произойти из-за пропавших без вести или неточных данных о карте в сервисе OpenStreetMap. Чтобы проверять, отсутствуют ли данные или неточные из-за картографического сервиса, рассмотрите просмотр данных о карте по внешнему средству просмотра карты.
Если вы получаете предупреждение, что геометрия дороги не может быть вычисленной, то искривление дороги слишком резко для нее, чтобы представить правильно, и она не импортируется.
Zenrin API 3.0 карты Японии (Itsumo NAVI API 3.0) ограничения импорта
Когда вы импортируете API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) данные, сгенерированная дорожная сеть имеет эти ограничения. В результате этих ограничений сгенерированная сетевая сила содержит погрешности, и дороги могут перекрыться.
Сгенерированная дорожная сеть использует дорожные данные о вертикальном изменении, когда API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) обеспечивает его. В противном случае сгенерированная сеть использует данные о вертикальном изменении ландшафта, обеспеченные сервисом.
Когда API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0), сервис предоставляет информацию с помощью области значений, такой как путем определения дороги с двумя - тремя маршрутами или дороги между 3-5.5 метрами шириной, сгенерированная дорожная сеть, использует скалярные значения вместо этого. Рассмотрите API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) дорога, которая имеет два - три маршрута. Сгенерированная дорожная сеть имеет два маршрута.
Маршруты в дорогах в сгенерированной сети имеют универсальную ширину. Рассмотрите дорогу, которая 4,25 метра шириной с двумя маршрутами. В сгенерированной дорожной сети каждый маршрут 2,125 метров шириной.
Если вы получаете предупреждение, что геометрия дороги не может быть вычисленной, то искривление дороги слишком резко для нее, чтобы представить правильно, и она не импортируется.
Где возможно, сгенерированная дорожная сеть использует дорожные имена, обеспеченные API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) сервис. В противном случае сгенерированная дорожная сеть использует имена по умолчанию, такие как Road1 и Road2.
Если дороги, которые вы импортируете, не смотрят как ожидалось, рассматривают импорт их при помощи приложения Driving Scenario Designer. Приложение может сделать процесс из поиска и устранения неисправностей и исправления дорог легче, чем попытка диагностировать и откорректировать их при помощи roadNetwork функция.
[1] Дюпюи, Мариус, и др. Спецификация Формата OpenDRIVE. Версия 1.4, Выпуск H, Документ № VI2014.106. Бад-Айблинг, Германия: VIRES Simulationstechnologie GmbH, 4 ноября 2015.
[1] Необходимо заключить отдельное соглашение с HERE для того, чтобы получить доступ к сервисам HDLM и получить необходимые учетные данные (access_key_id и access_key_secret) для использования Сервиса HERE.
[2] Чтобы получить доступ к API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) сервис и получить необходимые учетные данные (клиентский ID и секретный ключ), необходимо заключить отдельное соглашение с ZENRIN DataCom CO., LTD.