Задайте дорожные технические требования коннектора сегмента
laneSpecConnector объект задает технические требования для соединения двух дорожных сегментов с различными техническими требованиями маршрута. Смотрите compositeLaneSpec для получения дополнительной информации о создании дороги с несколькими техническими требованиями маршрута.
lc = laneSpecConnectorcompositeLaneSpec объект создать дорогу с несколькими техническими требованиями маршрута.
lc = laneSpecConnector(Name,Value)'TaperLength',20 задает длину заострения 20 метров. Для получения дополнительной информации о геометрических свойствах заострения и дорожных сегментов, см. Составную Спецификацию Маршрута.
TaperShape — Форма заострения'Linear' (значение по умолчанию) | 'None' | вектор символов | строковый скалярФорма заострения, соединяющего два дорожных сегмента в виде вектора символов или строкового скаляра, что частично или полностью совпадает с ConnectorTaperShape имя элемента перечисления. При создании объекта задайте это свойство как вектор символов или строковый скаляр, который должен частично или полностью совпадать с одним из этих имен элемента перечисления.
| Имя элемента перечисления | EnumeratedValue | Описание | Пример (Используя Лефт-Ту-Райт-Роуд) |
'Linear' | 0 | Текущий сегмент заостряется линейно при добавлении или отбрасывании маршрутов для следующего сегмента. |
|
'None' | 1 | Сегмент не заостряется, изменяясь резко при добавлении или отбрасывании маршрутов. |
|
Пример: 'TaperShape''none'
TaperLength — Длина заостренияДлина заострения, соединяющего два дорожных сегмента в виде действительной положительной скалярной величины. Модули исчисляются в метрах. Длина заострения по умолчанию является меньшим из 241 метры или 75 процент длины дорожного сегмента, содержащего заострение.
Примечание
Длина заострения должна быть меньше соответствующей дорожной длины сегмента. В противном случае функция сбрасывает его к значению, которое является 75 процент длины соответствующего дорожного сегмента.
Не задавайте длину заострения, когда форма заострения будет установлена в 'None'. Функция проигнорирует заданный вход.
Пример: 'TaperLength',20
Типы данных: double
Position — Дорожное положение коннектора сегмента'Right' (значение по умолчанию) | 'Left' | 'Both' | вектор символов | строковый скалярДорожное положение коннектора сегмента в виде вектора символов или строкового скаляра, что частично или полностью совпадает с ConnectorPosition имя элемента перечисления. Это свойство задает ребро дороги, из которой можно добавить или исключить маршруты. При создании объекта задайте это свойство как вектор символов или строковый скаляр, который должен частично или полностью совпадать с одним из этих имен элемента перечисления.
| Имя элемента перечисления | EnumeratedValue | Описание | Пример (Используя Лефт-Ту-Райт-Роуд) |
'Right' | 0 | Добавьте или исключите маршруты из правого края дороги. |
|
'Left' | 1 | Добавьте или исключите маршруты из левого края дороги. |
|
'Both' | 2 | Добавьте или исключите маршруты из обоих ребер дороги. |
|
Используйте это свойство только при соединении двух односторонних дорожных сегментов с различным количеством маршрутов. Чтобы добавить или пропустить маршруты от обоих ребра односторонней дороги, количество маршрутов дорожных сегментов должно отличаться четным числом.
Не задавайте это свойство при соединении дорожных сегментов, которые не являются односторонними потому что compositeLaneSpec объект игнорирует это свойство.
Соединять двухсторонние дорожные сегменты, compositeLaneSpec объект определяет положение коннектора из количества маршрутов, заданных соответствующими объектами спецификации маршрута. Например, если количеством маршрутов двухсторонних дорожных сегментов является [1 1] и [2 1], compositeLaneSpec объект применяет 'Left' положение.
Соединять односторонние и двухсторонние дорожные сегменты, compositeLaneSpec объект добавляет или исключает левые (обратные) маршруты из левого края дороги. Объект применяет 'Left' положение, когда количество правильных (прямых) маршрутов соответствует между обоими дорожными сегментами. В противном случае положение коннектора установлено в 'Both'. Например, если техническими требованиями маршрута двух дорожных сегментов является [1 2] и 2, compositeLaneSpec объект применяет 'Left' положение. В отличие от этого, если техническими требованиями маршрута двух дорожных сегментов является [1 2] и 1, compositeLaneSpec возразите устанавливает свойство положения на 'Both'.
Примечание
Ведущий сценарий полагает, что все маршруты на односторонней дороге правильные (прямые) маршруты, который принимает, что трафик течет в том же направлении как направление ничьей дороги. Для получения дополнительной информации о направлении ничьей дорог, смотрите, Чертят Направление Дороги и Нумерацию Маршрутов.
TaperShape и TaperLength свойства применяются, когда или количество маршрутов или сегмент width изменяются между дорожными сегментами. Однако Position свойство применяется, только при добавлении или отбрасывании маршрутов между дорожными сегментами.
Пример:
'Position', 'Both'
Создайте дорогу с несколькими техническими требованиями маршрута и добавьте одну полосу слева от односторонней дороги.
Создайте ведущий сценарий. Задайте дорожные центры прямой, 100-метровой дороги с направлением ничьей слева направо.
scenario = drivingScenario; roadCenters = [20 100; 20 0];
Задайте массив технических требований маршрута для двух односторонних дорожных сегментов. Первый дорожный сегмент имеет два маршрута, и второй дорожный сегмент имеет три маршрута.
lsArray = [lanespec(2) lanespec(3)];
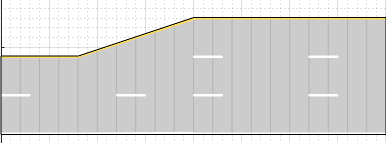
Задайте дорожный объект коннектора сегмента. Чтобы добавить третий маршрут в левую сторону второго дорожного сегмента, задайте свойство положения. Задайте длину заострения меньше, чем длина первого дорожного сегмента. Оба дорожные сегменты составляют 50 метров давно, по умолчанию, общая дорожная длина 100 метров, разделены одинаково между заданными дорожными сегментами.
lc = laneSpecConnector('Position','Left','TaperLength',30);
Создайте составной объект спецификации маршрута.
clspec = compositeLaneSpec(lsArray,'Connector',lc);Добавьте дорогу к ведущему сценарию и отобразите дорогу. Сценарий представляет дорожные сегменты в направлении ничьей дороги, слева направо.
road(scenario,roadCenters,'Lanes',clspec); plot(scenario) title('Road with Multiple Lane Specifications')

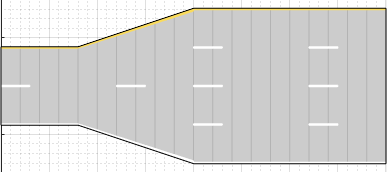
Создайте пустой ведущий сценарий. Задайте дорожные центры кривой дороги.
scenario = drivingScenario; roadCenters = [-20 22; 0 22; 18.8 15.8; 22 0; 22 -20];
Задайте технические требования маршрута для трех двухсторонних дорожных сегментов. Заметьте, что все дорожные сегменты имеют то же количество маршрутов. Однако второй дорожный сегмент имеет большую ширину маршрута (4,6 метра), чтобы расширить дорогу вдоль кривой. Другие два дорожных сегмента имеют ширину маршрута по умолчанию 3,6 метров.
lsArray = [lanespec([1 1]) lanespec([1 1],'Width',4.6) lanespec([1 1])];Задайте нормированные длины для каждого дорожного сегмента. Заметьте, что суммой нормированных длин является 1, и длина вектора совпадает с количеством объектов спецификации маршрута.
range = [0.25 0.65 0.1];
Создайте дорожный объект коннектора сегмента. Поскольку те же технические требования применяются к обоим коннекторам сегмента за три дорожных сегмента, создают только один laneSpecConnector объект. Поскольку вы ни не добавляете, ни пропускаете маршруты, не задавайте свойство положения дорожного коннектора сегмента.
lc = laneSpecConnector('TaperLength',14);Создайте составную спецификацию маршрута, возражают и добавляют дорогу к ведущему сценарию.
clspec = compositeLaneSpec(lsArray,'Connector',lc,'SegmentRange',range); road(scenario,roadCenters,'Lanes',clspec);
Постройте ведущий сценарий.
plot(scenario,'RoadCenters','on') title('Lane Widening Along a Curve')

Создать дорогу при помощи road функционируйте, задайте дорожные центры как матричный вход. Функция создает направленную линию, которая пересекает дорожные центры, начинающие с координат в первой строке матрицы и заканчивающиеся в координатах в последней строке матрицы. Координаты в первых двух строках матрицы задают draw direction дороги. Эти координаты соответствуют первым двум последовательным дорожным центрам. Направление ничьей является направлением, в котором дороги представляют в графике сценария.
Чтобы создать дорогу при помощи приложения Driving Scenario Designer, можно или задать параметр Road Centers или в интерактивном режиме привлечь Scenario Canvas. Для подробного примера смотрите, Создают Ведущий Сценарий. В этом случае направление ничьей является направлением, в котором дороги представляют в Scenario Canvas.
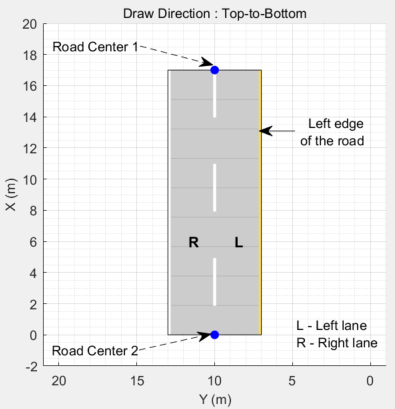
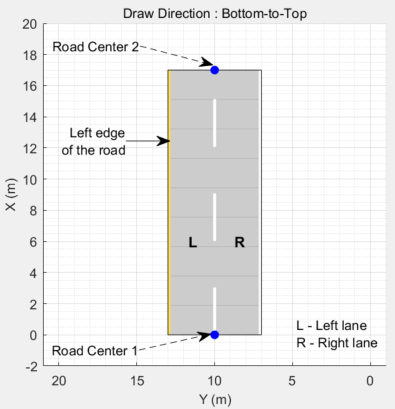
Для дороги с направлением ничьей от начала до конца различие между x - координаты первых двух последовательных дорожных центров положительно.
Поскольку дорога с нижней частью к верхней части чертит направление, различие между x - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
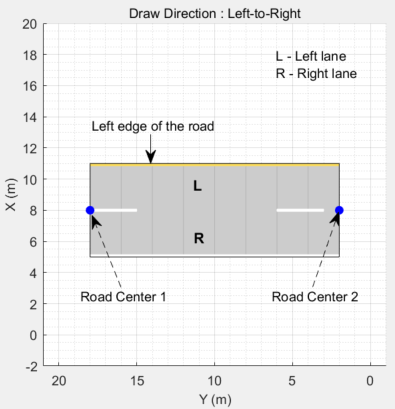
Для дороги со слева направо чертят направление, различие между y - координаты первых двух последовательных дорожных центров положительны.
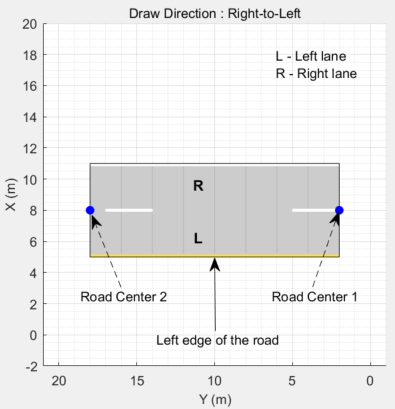
Для дороги со справа налево чертят направление, различие между y - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
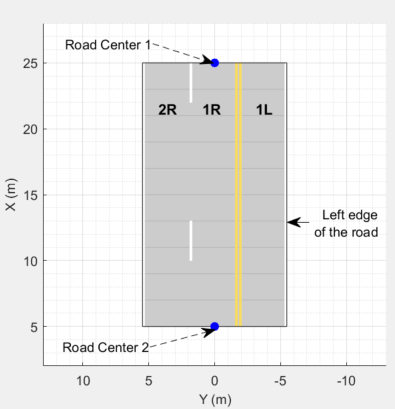
Маршруты должны быть пронумерованы слева направо с левым краем дороги, заданной относительно направления ничьей дороги. Для односторонней дороги, по умолчанию, левый край дороги является чисто желтой маркировкой, которая указывает на конец дороги в поперечном направлении (перпендикуляр направления, чтобы чертить направление). Для двухсторонней дороги, по умолчанию, оба ребра отмечены чистыми белыми линиями.
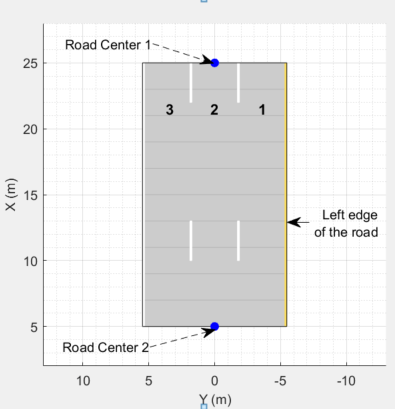
Например, эти схемы показывают, как маршруты пронумерованы на односторонней и двухсторонней дороге с направлением ничьей сверху донизу.
| Нумерация маршрутов на Он-Вей-Роуд | Нумерация маршрутов на Туо-Вей-Роуд |
Задайте количество маршрутов как положительное целое число для односторонней дороги. Если вы устанавливаете целочисленное значение как 1, 2, 3 обозначает первые, вторые, и третьи маршруты дороги, соответственно.
| Задайте количество маршрутов как двухэлементный вектор из положительного целого числа для двухсторонней дороги. Если вы устанавливаете вектор как [ 1L обозначает единственный левый маршрут дороги. 1R и 2R обозначают первые и вторые правильные маршруты дороги, соответственно.
|
Технические требования маршрута применяются согласно порядку, в котором пронумерованы маршруты.
Составная спецификация маршрута состоит из массива двух или больше технических требований маршрута для одной дороги. Каждая спецификация маршрута задает дорожный сегмент, который является разделом дороги с независимыми геометрическими свойствами, нормированной областью значений и заострением.
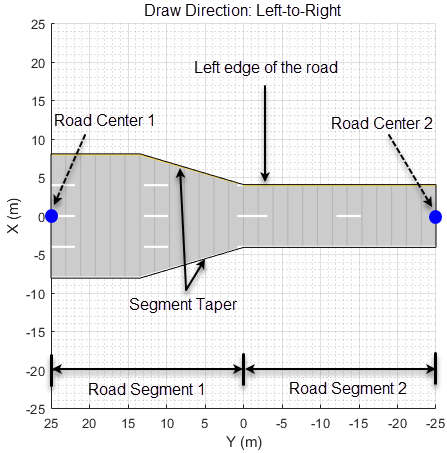
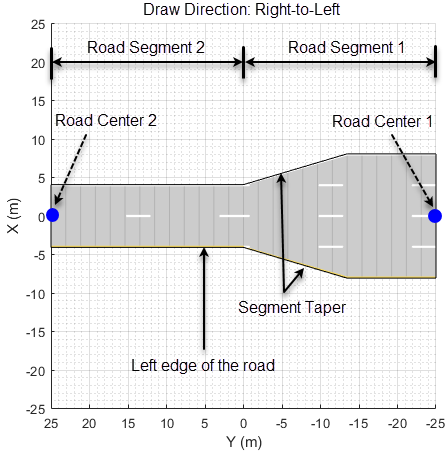
Каждый дорожный сегмент является направленным сегментом, который перемещается к итоговому дорожному центру, с первым сегментом, начинающимся в первом дорожном центре, второй запуск сегмента где первые концы, и так далее. Область значений каждого дорожного сегмента является нормированным расстоянием, которое задает пропорцию общей длины дороги. Когда дорожный сегмент добавляет или исключает маршруты из предыдущего сегмента, предыдущих заострений сегмента вдоль заданного расстояния, чтобы вместить изменение в количестве маршрутов.
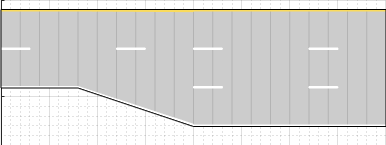
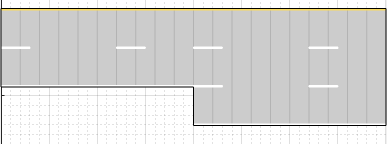
Когда вы представляете дорогу с составными техническими требованиями маршрута, дорожные сегменты представляют в направлении ничьей дороги. Например, рассмотрите одностороннюю дорогу с двумя дорожными сегментами, и значение по умолчанию нормировало область значений 0,5 для каждого дорожного сегмента. Первый дорожный сегмент содержит четыре маршрута, и второй сегмент содержит только два маршрута. Первые заострения сегмента от четырех маршрутов до двух маршрутов, исключая одну полосу из каждой стороны, когда это приближается к средней точке дороги, которая является стартовой точкой второго сегмента. Эти схемы показывают направление, в котором дорожные сегменты представляют, и как заострение применяется к дороге, и для слева направо, и справа налево чертите направления.
|
|
|
Для получения информации о геометрических свойствах маршрутов см. Технические требования Маршрута.