Реализовать кватернионное представление уравнений движения с шестью степенями свободы относительно осей ветра
Аэрокосмический блок/Уравнения движения/ 6DOF
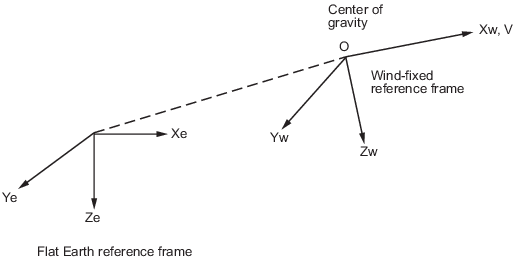
Блок 6DOF Wind (Quaternion) рассматривает вращение фиксированного ветром кадра координат (Xw, Yw, Zw) относительно плоского опорного кадра Земли (Xe, Ye, Ze). Дополнительные сведения о фиксированном ветром кадре координат см. в разделе Алгоритмы.
В аэрокосмической Blockset™ используются кватернионы, определенные с помощью соглашения scalar-first.
Блок предполагает, что приложенные силы действуют в центре тяжести тела, а масса и инерция постоянны.
Началом закреплённой ветром рамки координат является центр тяжести тела, а тело предполагается жёстким, предположение, исключающее необходимость учитывать силы, действующие между отдельными элементами массы. Плоская система отсчёта Земли считается инерционной, превосходной аппроксимацией, позволяющей пренебречь силами, обусловленными движением Земли относительно «неподвижных звёзд».
Поступательное движение фиксированного ветром кадра координат приведено ниже, где приложенные силы [Fx Fy Fz] T находятся в фиксированном ветром кадре, и масса тела m принимается постоянной.
ω¯b=[pbqbrb]Abb=[u˙bv˙bw˙b]=DCMwb[F¯wm−ω¯w×V¯w]
Динамика вращения неподвижного корпуса приведена ниже, где прикладываемые моменты равны [L M N] T, а тензор инерции I относительно начала координат тензора инерции I. Тензор инерции I легче определить в неподвижном корпусе .
[Ixx−Ixy−Ixz−IyxIyy−Iyz−Izx−IzyIzz]
Интегрирование скорости изменения вектора кватерниона приведено ниже.
]
[1] Стивенс, Брайан и Фрэнк Льюис. Управление и моделирование летательных аппаратов. Нью-Йорк: John Wiley & Sons, 1992.
6DOF (Эйлеровы углы) | 6DOF (кватернион) | 6DOF ECEF (кватернион) | 6DOF Ветер (углы ветра) | Настраиваемые переменные массовые 6DOF (углы Эйлера) | Настраиваемые переменные массовые 6DOF (кватернион) | Настраиваемая переменная масса 6DOF ECEF (кватернион) | Пользовательская переменная масса 6DOF Ветер (кватернион) | Пользовательская переменная масса 6DOF ветер (углы ветра) | Простые переменные массовые 6DOF (углы Эйлера) | Простая переменная массовая 6DOF (кватернион) | Простая переменная масса 6DOF ECEF (кватернион) | Простая переменная масса 6DOF ветер (кватернион) | Простая переменная масса 6DOF ветер (углы ветра)
