Реализовать уравнения трех степеней свободы движения пользовательской переменной массы относительно осей ветра
Аэрокосмический блок/Уравнения движения/ 3DOF
Блок 3DOF пользовательских переменных масс (оси ветра) реализует уравнения движения пользовательских переменных масс с тремя степенями свободы относительно осей ветра. Рассматривается поворот в вертикальной плоскости фиксированного ветром кадра координат относительно плоского опорного кадра Земли. Дополнительные сведения о вращении и уравнениях движения см. в разделе Алгоритмы.
Fx - Приложенная сила вдоль оси xПриложенная сила вдоль оси x ветра, заданной как скаляр, в единицах измерения, выбранных в разделе Единицы измерения (Units).
Типы данных: double
Fz - Приложенная сила вдоль оси zПриложенная сила вдоль оси z ветра, заданная как скаляр.
Типы данных: double
M - Приложенный момент тангажаПриложенный момент шага, заданный как скаляр.
Типы данных: double
dm/dt - Скорости изменения массыОдна или несколько скоростей изменения массы (положительная при аккреции, отрицательная при абляции), заданных как скаляр.
Типы данных: double
m - МассаМасса, заданная как скаляр.
Типы данных: double
dI/dt - Скорость изменения тензора инерцииСкорость изменения тензора инерции, Iyy, заданная как скаляр.
Чтобы включить этот порт, задайте для параметра Mass type значение Custom Variable.
Типы данных: double
I - Тензор инерцииТензор инерции, заданный как скаляр.
Чтобы включить этот порт, задайте для параметра Mass type значение Custom Variable.
Типы данных: double
g - ГравитацияСила тяжести, заданная как скаляр.
Чтобы включить этот порт, установите для параметра Источник силы тяжести значение External.
Типы данных: double
Vre - Относительные скоростиСумма одной или более относительных скоростей, при которых масса аккретируется или аблируется от тела в фиксированных по телу осях, определяемых как двухэлементный вектор.
Чтобы включить этот порт, выберите Включить относительную скорость массового потока.
Типы данных: double
γ - Угол траектории полетаУгол траектории полета, в пределах ± pi, возвращен как скаляр, в радианах.
Типы данных: double
ωy (rad/s) - Угловая скорость тангажаУгловая скорость тангажа, заданная как скаляр, в радианах в секунду.
Типы данных: double
dωy/dt - Угловое ускорение тангажаУгловое ускорение тангажа, возвращаемое как скаляр, в радианах в секунду в квадрате.
Типы данных: double
XeZe - Расположение кузоваМестоположение тела в плоской системе координат Земли, (Xe, Ze), возвращаемое в виде двухэлементного вектора.
Типы данных: double
Vw - Скорость в неподвижной рамеСкорость тела, разрешенная в фиксированную ветром координатную рамку (V, 0), возвращается в виде двухэлементного вектора.
Типы данных: double
AxbAzb - Ускорение кузоваУскорение тела по отношению к фиксированному телом кадру координат (Ax, Az) возвращается в виде двухэлементного вектора.
Типы данных: double
α - Угол атакиУгол атаки, возвращаемый как скаляр, в радианах.
Типы данных: double
AxeAze - Ускорение кузоваУскорения тела по отношению к инерционному (плоскому земному) кадру координат, возвращаемые как двухэлементный вектор. Обычно этот сигнал подключается к акселерометру.
Чтобы включить этот порт, установите флажок Включить инерционное ускорение.
Типы данных: double
Units - Блоки ввода и выводаMetric (MKS) (по умолчанию) | English (Velocity in ft/s) | English (Velocity in kts)Единицы ввода и вывода, указанные как Metric (MKS), English (Velocity in ft/s), или English (Velocity in kts).
| Единицы | Силы | Момент | Ускорение | Скорость | Положение | Масса | Инерция |
|---|---|---|---|---|---|---|---|
Metric (MKS) | Ньютон | Ньютон-метр | Метров в секунду в квадрате | Метров в секунду | Метры | Килограмм | Килограммовый метр в квадрате |
English (Velocity in ft/s) | Фунт | Фут-фунт | Футов в секунду в квадрате | Футов в секунду | Ноги | Слизняк | Слизистая ножка в квадрате |
English (Velocity in kts) | Фунт | Фут-фунт | Футов в секунду в квадрате | Узлы | Ноги | Слизняк | Слизистая ножка в квадрате |
Параметр блока:
units |
| Текст: символьный вектор |
Значения: Metric (MKS) | English (Velocity in ft/s) | English (Velocity in kts) |
По умолчанию: Metric (MKS) |
Mass type - Тип массыCustom Variable (по умолчанию) | Simple Variable | FixedТип массы, указанный в следующей таблице.
| Тип массы | Описание | По умолчанию для |
|---|---|---|
Fixed | Масса постоянна на протяжении всего моделирования. | |
Simple Variable | Масса и инерция изменяются линейно в зависимости от массового расхода. | |
Custom Variable | Вариации массы и инерции настраиваются. |
Custom Variable выбор соответствует ранее описанным уравнениям движения.
Параметр блока:
mtype |
| Текст: символьный вектор |
Значения:
Fixed | Simple Variable | Custom Variable |
По умолчанию:
'Custom Variable' |
Initial airspeed - Начальная скорость100 (по умолчанию) | скалярНачальная скорость тела, (V0), заданная как скаляр.
Параметр блока:
V_ini |
| Текст: символьный вектор |
Значения:
'100' | скаляр |
По умолчанию:
'100' |
Initial incidence - Начальный угол0 (по умолчанию) | скалярНачальный угол между вектором скорости и телом (α0), заданный как скаляр.
Параметр блока: alpha_ini |
| Текст: символьный вектор |
Значения:
'0' | скаляр |
По умолчанию: '0' |
Initial flight path angle - Угол начальной траектории полета0 (по умолчанию) | скалярНачальный угол траектории полета тела (γ 0), заданный как скаляр.
Параметр блока: gamma_ini |
| Текст: символьный вектор |
Значения:
'0' | скаляр |
По умолчанию: '0' |
Initial body rotation rate - Скорость вращения начального тангажа0 (по умолчанию) | скалярНачальная скорость вращения основного тона, (q0), заданная как скаляр.
Параметр блока:
q_ini |
| Текст: символьный вектор |
Значения:
'0' | скаляр |
По умолчанию:
'0' |
Initial position (x,z) - Исходное местоположение[0 0] (по умолчанию) | двухэлементный векторНачальное расположение тела в плоской системе координат Земли, определяемое как двухэлементный вектор.
Параметр блока:
pos_ini |
| Текст: символьный вектор |
Значения:
'[0 0]' | двухэлементный вектор |
По умолчанию:
'[0 0]' |
Gravity Source - Гравитационный источникInternal (по умолчанию) | ExternalИсточник силы тяжести, указанный как:
External | Переменный гравитационный ввод в блок |
Internal | Постоянная сила тяжести, указанная в маске |
Параметр блока: g_in |
| Текст: символьный вектор |
Значения: 'Internal' | 'External' |
По умолчанию: 'Internal' |
Acceleration due to gravity - Гравитационный источник9.81 (по умолчанию) | скалярУскорение из-за силы тяжести, указанное как двойной скаляр и используемое, если выбран внутренний источник силы тяжести. Если при моделировании необходимо пренебречь силой тяжести, это значение можно установить равным 0.
Чтобы включить этот параметр, задайте для параметра Источник силы тяжести значение Internal.
Параметр блока: g |
| Текст: символьный вектор |
Значения:
'9.81' | скаляр |
По умолчанию: '9.81' |
Include mass flow relative velocity - Порт относительной скорости массового потокаoff (по умолчанию) | onУстановите этот флажок, чтобы добавить порт относительной скорости массового потока. Это относительная скорость, с которой происходит аккреция или абляция массы.
Параметр блока: vre_flag |
| Текст: символьный вектор |
Значения: off | on |
По умолчанию:
'off' |
Include inertial acceleration - Включить инерционный порт ускоренияoff (по умолчанию) | onУстановите этот флажок, чтобы добавить инерционное ускорение в порт вывода плоского земного кадра. Обычно этот сигнал подключается к акселерометру.
Чтобы включить порт AxeAze, выберите этот параметр.
Параметр блока: abi_flag |
| Текст: символьный вектор |
Значения:
'off' | 'on' |
По умолчанию:
'off' |
Присвойте каждому состоянию уникальное имя. Во время линеаризации вместо контуров блоков можно использовать имена состояний.
Чтобы назначить имя одному состоянию, введите уникальное имя между кавычками, например: 'velocity'.
Чтобы назначить имена нескольким состояниям, введите разделенный запятыми список, окруженный фигурными скобками, например: {'a', 'b', 'c'}. Каждое имя должно быть уникальным.
Если параметр пуст (' '), имя не назначено.
Имена состояний применяются только к выбранному блоку с параметром name.
Число состояний должно равномерно делиться между числом имен состояний.
Можно указать меньше имен, чем состояний, но нельзя указать больше имен, чем состояний.
Например, можно указать два имени в системе с четырьмя состояниями. Первое имя относится к первым двум состояниям, а второе - к последним двум состояниям.
Чтобы назначить имена состояний переменной в рабочей области MATLAB ®, введите переменную без кавычек. Переменная может быть символьным вектором, массивом ячеек или структурой.
Velocity: e.g., 'V' - Название состояния скорости'' (по умолчанию) | символьный векторИмя состояния скорости, указанное как символьный вектор.
Параметр блока: V_statename |
| Текст: символьный вектор |
Значения:
'' | скаляр |
По умолчанию: '' |
Incidence angle e.g., 'alpha' - Наименование состояния угла падения'' (по умолчанию) | скалярИмя состояния угла падения, указанное как скаляр.
Параметр блока:
alpha_statename |
| Текст: символьный вектор |
Значения:
'' | скаляр |
По умолчанию:
'' |
Flight path angle: e.g., 'gamma' - Наименование состояния угла траектории полета'' (по умолчанию) | символьный векторИмя состояния угла траектории полета, указанное как символьный вектор.
Параметр блока: gamma_statename |
| Текст: символьный вектор |
Значения:
'' | скаляр |
По умолчанию: '' |
Body rotation rate: e.g., 'q' - Имя состояния вращения тела'' (по умолчанию) | скалярИмена состояний частоты вращения тела, указанные как символьный вектор.
Параметр блока: q_statename |
| Текст: символьный вектор |
Значения:
'' | скаляр |
По умолчанию: '' |
Position: e.g., {'Xe', 'Ze'} - Наименование состояния позиции'' (по умолчанию) | разделенный запятыми список, окруженный фигурными скобкамиИмена состояний позиций, заданные как разделенный запятыми список, окруженный фигурными скобками.
Параметр блока: pos_statename |
| Текст: символьный вектор |
Значения:
'' | разделенный запятыми список, окруженный фигурными скобками |
По умолчанию: '' |
Блок рассматривает вращение в вертикальной плоскости фиксированного ветром кадра координат относительно плоского опорного кадра Земли.
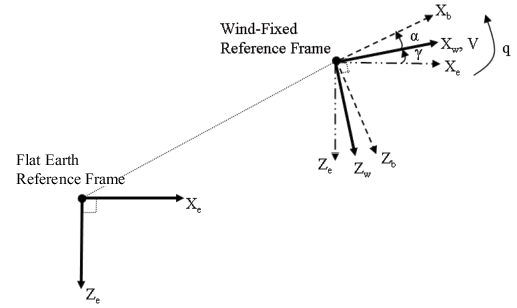
Уравнения движения:
где предполагается, что приложенные силы действуют в центре тяжести тела. Vwrew - относительная скорость в осях ветра, при которой массовый поток () выбрасывается или добавляется в тело в осях ветра.
[1] Стивенс, Брайан и Фрэнк Льюис. Управление и моделирование летательных аппаратов. Нью-Йорк: John Wiley & Sons, 1992.
3DOF (Оси тела) | 3DOF (ветровые оси) | Масса точки 4-го порядка (продольная) | Пользовательские переменные массовые 3DOF (оси тел) | Простая переменная массовая 3DOF (оси тела) | Простая переменная массовая 3DOF (ветровые оси)
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
