Извлечь компоненты управления SISO из контроллера PID 2-DOF
[ анализирует диспетчера PID с 2 финансовыми департаментами C,X] = getComponents(C2,looptype)C2 на два компонента управления SISO. Один из компонентов управления, C, является контроллером 1-DOF PID. Другой, X, является динамической системой SISO. Когда C и X соединены в структуре контура, указанной looptypeрезультирующая система с замкнутым контуром эквивалентна контуру управления 2-DOF.
Для получения дополнительной информации об архитектуре контроля за PID с 2 финансовыми департаментами, см. Двух Диспетчеров PID Степени свободы.
C2 - 2-DOF PID-контроллерpid2 объект | pidstd2 объект2-DOF PID контроллер для разложения, указанный как pid2 или pidstd2 объект контроллера.
looptype - Структура контура'feedforward' (по умолчанию) | 'feedback' | 'filter'Структура контура для разложения контроллера 2-DOF, указанная как 'feedforward', 'feedback', или 'filter'. Они соответствуют следующим декомпозициям и архитектурам управления:
'feedforward' — C - обычный контроллер PID SISO, который принимает сигнал ошибки в качестве своего входа. X является контроллером прямой связи, как показано:
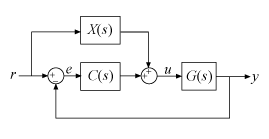
Если C2 является контроллером непрерывной, параллельной формы, затем компоненты задаются:
Kp + (c − 1) KdTfs + 1.
Следующая команда создает систему с замкнутым контуром от r до y для конфигурации прямой связи.
T = G*(C+X)*feedback(1,G*C);
'feedback' — C - обычный контроллер PID SISO, который принимает сигнал ошибки в качестве своего входа. X является контроллером обратной связи от y до u, как показано:
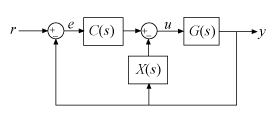
Если C2 является контроллером непрерывной, параллельной формы, затем компоненты задаются:
Kp + (1 − c) KdTfs + 1.
Следующая команда создает систему с замкнутым контуром от r до y для конфигурации обратной связи.
T = G*C*feedback(1,G*(C+X));
'filter' — X является предварительным фильтром опорного сигнала. C - обычный контроллер PID SISO, который принимает за свой вход разность между отфильтрованным эталоном и выходом, как показано:
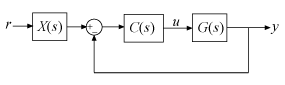
Если C2 является контроллером непрерывной, параллельной формы, затем компоненты задаются:
KpTf + Kd) s2 + (Kp + KiTf) s + Ki.
Следующая команда создает систему с замкнутым контуром от r до y для конфигурации фильтра.
T = X*feedback(G*C,1);
Формулы, показанные выше, относятся к контроллерам непрерывной и параллельной формы. Контроллеры стандартной формы и контроллеры за дискретное время могут быть разложены на аналогичные конфигурации. getComponents командуйте работами над всем контроллером PID с 2 финансовыми департаментами объекты.
