Пакет: vision.labeler.loading
Суперклассы: vision.labeler.loading.MultiSignalSource
Загрузка сигналов из источников rosbag в приложение Ground Truth Labeler
vision.labeler.loading.RosbagSource создает интерфейс для загрузки сигналов из файлов rosbag в приложение Ground Truth Labeler. в диалоговом окне Add/Remove Signal приложения, если для параметра Source Type установлено значение Rosbag, этот класс управляет параметрами в этом диалоговом окне.
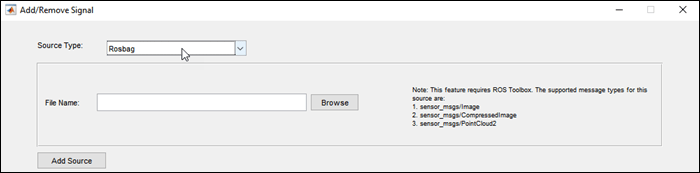
Чтобы открыть это диалоговое окно, в приложении выберите Импорт > Добавить сигналы.
Реализация этого класса по умолчанию загружает сигналы из следующих типов сообщений ROS:
sensor_msgs/Image
sensor_msgs/CompressedImage
sensor_msgs/PointCloud2
Примечание
Для этого класса требуется панель инструментов ROS.
vision.labeler.loading.RosbagSource класс является handle класс.
При экспорте меток из сеанса приложения Ground Truth Labeler, содержащего источники rosbag, экспортируется groundTruthMultisignal объект хранит экземпляры этого класса в своем DataSource собственность.
Создание RosbagSource программно, например, при программном создании groundTruthMultisignal объект, используйте vision.labeler.loading.RosbagSource функция (описана здесь).
rosbagSource = vision.labeler.loading.RosbagSourceRosbagSource объект загрузки сигналов от источников данных rosbag. Чтобы указать источник данных и параметры, необходимые для загрузки источника, используйте loadSource способ.
Этот класс можно использовать в качестве отправной точки для создания пользовательского класса загрузки источника данных. Чтобы просмотреть исходный код для этого класса, используйте следующую команду:
edit vision.labeler.loading.RosbagSource