Приложение Ground Truth Labeler предоставляет возможности для маркировки двух типов сигналов.
Сигналы изображения основаны на изображении. Эти сигналы можно загружать из таких источников, как видео или последовательности изображений.
Сигналы облака точек основаны на лидаре. Эти сигналы можно загружать из таких источников, как последовательность файлов облаков точек.
В этом примере вы загружаете видео и последовательность облаков точек в приложение. Эти сигналы снимаются с датчика камеры и датчика лидара, установленного на транспортном средстве. Сигналы представляют одну и ту же сцену вождения.
Загрузите метки времени для последовательности облаков точек. Временными метками являются duration вектор, который находится в той же папке, что и последовательность. Чтобы загрузить метки времени, необходимо временно добавить эту папку в путь поиска MATLAB ® .
pcSeqFolder = fullfile(toolboxdir('driving'),'drivingdata','lidarSequence'); addpath(pcSeqFolder) load timestamps.mat rmpath(pcSeqFolder)
Приложение также предоставляет возможность указать временные метки для источников видео. Видео, используемое в этом примере, не имеет отдельного файла временных меток, поэтому при загрузке видео можно считывать временные метки непосредственно из источника видео.
Чтобы открыть приложение Ground Truth Labeler, в командной строке MATLAB введите эту команду.
groundTruthLabeler
Приложение откроется в пустой сессии.
Можно также открыть приложение на вкладке «Приложения» в разделе «Автомобильная техника».
Приложение Ground Truth Labeler позволяет загружать сигналы из нескольких типов источников данных. В приложении источником данных является файл или папка, содержащие один или несколько сигналов для маркировки.
Для видео источником данных является файл MP4, содержащий одно видео.
Для последовательности облаков точек источником данных является папка, содержащая последовательность файлов данных облаков точек (PCD). Вместе эти файлы представляют собой одну последовательность облаков точек.
Другие источники данных, например rosbags, могут содержать несколько сигналов, которые можно загрузить. Дополнительные сведения о взаимосвязи между источниками и сигналами см. в разделе Источники и сигналы в маркировке истинности земли.
Загрузите видео в приложение.
На панели инструментов приложения щелкните Импорт > Добавить сигналы.
Откроется диалоговое окно Добавить/удалить сигнал (Add/Remove Signal), в котором для параметра Тип источника (Source Type) установлено значение Video и параметр Timestamps имеет значение From File.
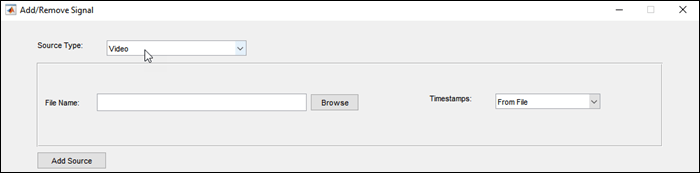
В параметре «Имя файла» найдите этот видеофайл. <matlabroot> полный путь к папке установки MATLAB, возвращенный matlabroot функция.
<matlabroot>\toolbox\driving\drivingdata\01_city_c2s_fcw_10s.mp4
Щелкните Добавить источник (Add Source). Видео загружается в приложение, и приложение считывает метки времени непосредственно из видео. В исходной таблице отображается информация об источнике видеоданных.
Загрузите последовательность облаков точек в приложение.
При открытом диалоговом окне Add/Remove Signal и загрузке видео установите для параметра Source Type значение Point Cloud Sequence. В диалоговом окне отображаются новые параметры загрузки последовательностей облаков точек.
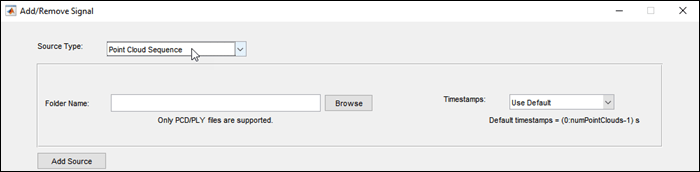
В параметре Имя папки найдите lidarSequence папка, содержащая последовательность загружаемых файлов данных облака точек (PCD).
<matlabroot>\toolbox\driving\drivingdata\lidarSequence
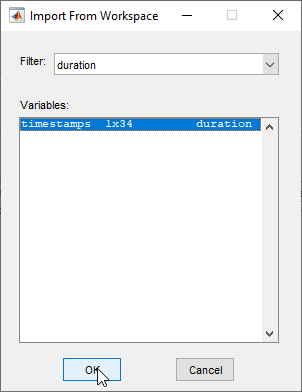
Задайте для параметра Timestamps значение From Workspace. В диалоговом окне «Импорт из рабочего пространства» выберите timestamps переменная, загруженная для последовательности облака точек. Нажмите кнопку ОК.
Щелкните Добавить источник (Add Source). Последовательность облаков точек загружается в приложение, и приложение считывает метки времени из timestamps переменная. В исходной таблице отображается информация об источнике данных для последовательности облаков точек.
В таблице в нижней части диалогового окна Add/Remove Signal отображается информация о загруженных сигналах. Убедитесь, что в таблице отображается эта информация для загруженных сигналов.
В столбце Signal Name отображаются имена сигналов, генерируемые приложением. Для видео имя сигнала является именем файла источника данных с префиксом. video_ и без расширения файла. Для последовательности облаков точек именем сигнала является имя исходной папки.
В столбце «Источник» отображаются полные пути к источникам данных сигнала.
В столбце Signal Type отображается тип каждого сигнала. Видео имеет тип Image. Последовательность облаков точек имеет тип Point Cloud.
В столбце Time Range отображается длительность сигналов на основе загруженных данных временной метки. Длина обоих сигналов составляет приблизительно 10 секунд.
Для последовательности облаков точек, если для параметра «Метки времени» задано значение Use Default, то значение временного диапазона для последовательности находится в диапазоне от 0 до 33 секунд. Этот диапазон основан на 34 PCD-файлах в папке. По умолчанию приложение устанавливает временные метки последовательности облаков точек в duration вектор от 0 до числа допустимых файлов облака точек минус 1. Единицы измерения в секундах. В случае возникновения этой проблемы в таблице установите флажок для строки последовательности облаков точек. Затем нажмите кнопку Delete Selected, снова загрузите сигнал и проверьте информацию о сигнале.
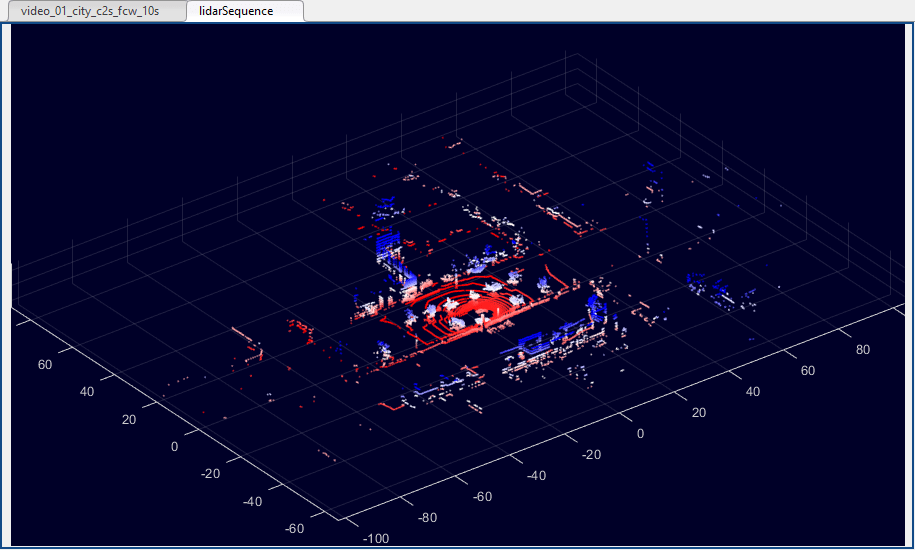
После проверки правильности загрузки сигналов нажмите кнопку OK. Приложение загружает сигналы и открывает первый кадр последнего добавленного сигнала, который для этого примера является последовательностью облаков точек.
При первой загрузке сигналов приложение отображает только один сигнал за один раз. Чтобы отобразить сигналы бок о бок, сначала на вкладке «Метка» панели инструментов приложения щелкните Показать сетку. Затем переместите указатель, чтобы выбрать сетку 1 на 2, и щелкните сетку.
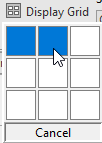
Последовательность видео и облаков точек отображается бок о бок.
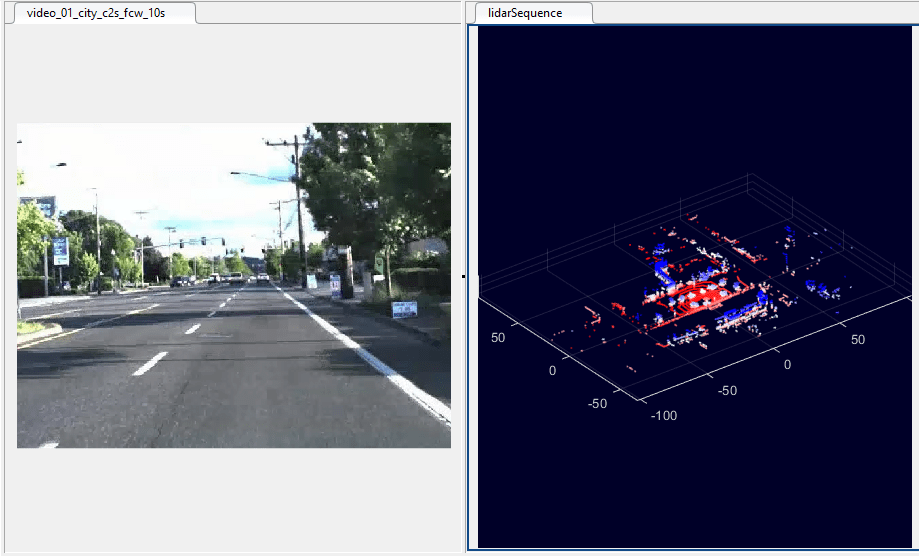
Чтобы просмотреть последовательность видео и облаков точек вместе, в ползунке под сигналами нажмите кнопку «Воспроизведение». ![]() Видео воспроизводится более плавно, чем последовательность облаков точек, потому что видео имеет больше кадров в течение приблизительно того же периода времени и, следовательно, более высокую частоту кадров.
Видео воспроизводится более плавно, чем последовательность облаков точек, потому что видео имеет больше кадров в течение приблизительно того же периода времени и, следовательно, более высокую частоту кадров.
По умолчанию приложение воспроизводит все кадры из сигнала с наибольшей частотой кадров. Этот сигнал называется ведущим сигналом. Для всех остальных сигналов приложение отображает кадр, который выровнен по времени с текущим отображаемым кадром главного сигнала. Чтобы настроить, какой сигнал является основным, используйте опции в диалоговом окне «Параметры управления воспроизведением». Чтобы открыть это диалоговое окно, под ползуном нажмите кнопку настройки часов. ![]() Дополнительные сведения об использовании этих параметров для управления отображением сигнальных кадров см. в разделе Управление воспроизведением сигнальных кадров для маркировки.
Дополнительные сведения об использовании этих параметров для управления отображением сигнальных кадров см. в разделе Управление воспроизведением сигнальных кадров для маркировки.
После загрузки сигнала и просмотра кадров теперь можно создавать определения меток и маркировать данные, как описано в разделе Достоверность метки на земле для нескольких сигналов.
