Мультисенсорный, многообъектный PHD-трекер
Панель инструментов для слияния и отслеживания датчиков/алгоритмы отслеживания нескольких объектов
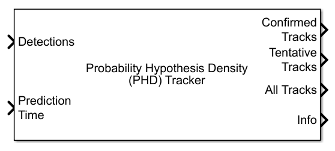
Блок отслеживания плотности гипотезы вероятности (PHD) создает и управляет дорожками стационарных и движущихся объектов в среде с несколькими датчиками. Трекер использует фильтр плотности гипотез множественных целей для оценки состояний точечных целей и расширенных объектов. PHD представлен взвешенным суммированием функций плотности вероятности, и пики в PHD извлекаются для представления возможных целей. Дополнительные сведения см. в разделе Алгоритмы.
Detections - Список обнаруженияСписок обнаружения, указанный как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание | Напечатать |
|---|---|---|
NumDetections | Количество обнаружений | Целое число. |
Detections | Обнаружения объектов | Массив структур обнаружения объектов. Первое NumDetections из этих обнаружений являются фактическими обнаружениями. |
Поля Detections являются:
| Область | Описание | Напечатать |
|---|---|---|
Time | Время измерения | single или double |
Measurement | Измерения объектов | single или double |
MeasurementNoise | Ковариационная матрица шума измерения | single или double |
SensorIndex | Уникальный идентификатор датчика | single или double |
ObjectClassID | Идентификатор классификации объектов | single или double |
MeasurementParameters | Параметры, используемые функциями инициализации фильтров слежения | Шина Simulink |
ObjectAttributes | Дополнительная информация передана трекеру | Шина Simulink |
Посмотрите objectDetection для получения более подробных пояснений по этим полям.
Примечание
Структура обнаружения объекта содержит Time поле. Метка времени каждого обнаружения объекта должна быть меньше или равна времени текущего вызова блока. Тег времени также должен быть больше времени обновления, указанного в предыдущем вызове блока.
Prediction Time - Отслеживание времени обновленияВремя обновления отслеживания, указанное как действительный скаляр в секундах. Трекер обновляет все дорожки до этого времени. Время обновления должно увеличиваться с каждым вызовом блока. Единицы измерения в секундах. Время обновления должно быть не менее наибольшего Time задается на входном порте Detections.
Если этот порт не активизирован, время обновления определяется синхросигналом моделирования, управляемым Simulink.
Чтобы включить этот порт, на вкладке Port Setting установите для параметра Prediction time source значение Input port.
Sensor Configurations - Конфигурации датчиков слеженияКонфигурации датчиков слежения, указанных как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание | Напечатать |
|---|---|---|
NumConfigurations | Количество конфигураций датчиков | Целое число. |
Configurations | Конфигурации датчиков | Массив структур конфигурации датчиков. Первое NumConfigurations из этих конфигураций являются фактическими конфигурациями. Допустимые имена и определения полей совпадают с соответствующими свойствами поля trackingSensorConfiguration объект. |
Чтобы включить этот порт, на вкладке Tracker выберите параметр Update sensor configuration with time.
State Parameters - Параметры состояния дорожкиПараметры состояния отслеживания, заданные как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание |
|---|---|
NumParameters | Количество нестандартных параметров состояния, указанных как неотрицательное целое число |
Parameters | Массив структур параметров состояния |
Блок использует значение Parameters поле для StateParameters поле сформированных дорожек. Эти параметры можно использовать для определения опорной рамки, в которой сообщается о дорожке, или других требуемых атрибутов сгенерированных дорожек.
Например, можно использовать следующую структуру для определения прямоугольной опорной рамки, исходная позиция которой находится в [10 10 0] метров и чья начальная скорость [2 -2 0] метров в секунду относительно кадра сценария.
| Имя поля | Стоимость |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Чтобы включить этот порт, на вкладке Tracker Configuration выберите параметр Update track state parameters with time.
Confirmed Tracks - Подтвержденные трекиПодтвержденные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Структура имеет вид:
| Область | Описание |
|---|---|
NumTracks | Количество дорожек. |
Tracks | Массив структур дорожек длиной, заданной параметром Максимальное количество дорожек. Только первый NumTracks из них фактические треки. |
Поля структуры дорожки отображаются в структуре дорожки.
Tentative Tracks - Предварительные направленияПредварительные трассы, возвращенные в виде шины Simulink, содержащей структуру MATLAB. Трек является предварительным, прежде чем он будет подтвержден. Выходные данные этого порта имеют ту же форму, что и выходные данные порта Confirmed Tracks.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable tentative tracks output.
All Tracks - Подтвержденные и предварительные трекиСводный список подтвержденных и предварительных дорожек, возвращенных в виде шины Simulink, содержащей структуру MATLAB. Выходные данные этого порта имеют ту же форму, что и выходные данные порта Confirmed Tracks.
Чтобы включить этот порт, на вкладке Port Setting выберите Enable all tracks output.
Info - Дополнительная информация для анализа обновлений отслеживанияДополнительная информация для анализа обновлений дорожки, возвращенная в виде шины Simulink, содержащей структуру MATLAB.
В этой таблице представлены поля информационной структуры:
| Область | Описание |
CorrectionOrder | Порядок, в котором используются датчики для коррекции оценки состояния, возвращаемый в виде вектора строки |
TrackIDsAtStepBeginning | Отслеживать идентификаторы при начале шага. |
DeletedTrackIDs | Идентификаторы дорожек, удаленных во время шага. |
TrackIDsAtStepEnd | Отслеживать идентификаторы по завершении шага. |
SensorAnalysisInfo | Массив данных анализа датчиков. |
SensorAnalysisInfo поле может включать в себя несколько отчетов с информацией о датчиках. Каждый отчет представляет собой структуру, содержащую следующие поля:
| Область | Описание |
SensorIndex | Индекс датчика. |
DetectionCells | Ячейки обнаружения, возвращаемые в виде логической матрицы. Каждый столбец матрицы обозначает ячейку обнаружения. В каждом столбце, если i-й элемент равен 1, то i-е обнаружение принадлежит ячейке обнаружения, обозначенной этим столбцом. |
DetectionLikelihoods | Возможности ассоциации между компонентами в функции плотности и ячейках обнаружения, возвращаемые в виде матрицы N-by-P. N - количество компонентов в функции плотности, а P - число ячеек детектирования. |
IsBirthCells | Указывает, перечислены ли ячейки обнаружения в |
NumPartitions | Количество разделов. |
DetectionProbability | Вероятность обнаружения сенсором существующих дорожек, возвращаемых в виде вектора строки 1-by-N, где N - количество составляющих в функции плотности. |
LabelsBeforeCorrection | Метки компонентов в функции плотности перед коррекцией, возвращаемые в виде вектора строки 1-by-Mb. Мб - количество компонентов, сохраненных в трекере до исправления. Каждый элемент вектора является |
LabelsAfterCorrection | Метки компонентов в функции плотности после коррекции, возвращаемые в виде вектора строки 1-by-Ma. Ma - количество компонентов, сохраняемых в трекере после коррекции. Каждый элемент вектора является |
WeightsBeforeCorrection | Веса компонентов в функции плотности до коррекции, возвращаемые в виде вектора строки 1-by-Mb. Мб - количество компонентов, сохраненных в трекере до исправления. Каждый элемент вектора - это вес соответствующего компонента в |
WeightsAfterCorrection | Веса компонентов в функции плотности после коррекции, возвращаемые в виде вектора строки 1-by-Ma. Ma - количество компонентов, сохраняемых в трекере после коррекции. Каждый элемент вектора - это вес соответствующего компонента в |
Чтобы включить этот порт, на вкладке Port Setting выберите Enable information output.
Tracker identifier - Уникальный идентификатор трекера0 (по умолчанию) | неотрицательное целое числоУникальный идентификатор трекера, указанный как неотрицательное целое число. Этот параметр передается как SourceIndex в выходах трекера и различает дорожки, которые поступают от разных трекеров в системе с несколькими трекерами. Необходимо указать это свойство как положительное целое число, чтобы использовать выходные данные дорожки в качестве входных данных для блока Fuser Track-To-Track.
Пример: 1
Detection partition function - Функция разделения обнаружений на ячейки обнаружения@partitionDetections (по умолчанию) | дескриптор функции | символьный векторФункция для разбиения обнаружений на ячейки обнаружения, заданная как дескриптор функции или как символьный вектор. Если каждый датчик может сообщать о нескольких обнаружениях на объект, необходимо использовать функцию секционирования. Функция секционирования сообщает обо всех возможных секциях обнаружений от датчика. В каждом разделе обнаружения разделяются на взаимоисключающие ячейки обнаружения, предполагая, что каждая ячейка обнаружения принадлежит одному расширенному объекту.
Можно также указать собственную функцию секционирования обнаружений. Для получения рекомендаций по написанию этой функции можно ознакомиться с подробностями функции секционирования по умолчанию. partitionDetections, с использованием type команда:
type partitionDetectionsПример:
@myfunction или 'myfunction'
Detection selection threshold - Порог выбора обнаружений для инициализации компонента25 (по умолчанию) | действительный положительный скалярПорог выбора обнаружений для инициализации компонента, заданный как положительный скаляр. Во время коррекции трекер вычисляет вероятность ассоциации между существующими дорожками и ячейками обнаружения. Если вероятность ассоциации (заданная отрицательным логарифмическим правдоподобием) ячейки обнаружения для всех существующих дорожек выше порога (что означает, что ячейка обнаружения имеет низкую вероятность ассоциации с существующими дорожками), ячейка обнаружения используется для инициализации новых компонентов в адаптивной плотности рождения.
Пример: 18.1
Типы данных: single | double
Maximum number of sensors - Максимальное количество датчиков20 (по умолчанию) | положительное целое числоМаксимальное количество датчиков, которые могут быть подключены к трекеру, указанное как положительное целое число. MaxNumSensors должно быть больше или равно наибольшему значению SensorIndex найдено во всех обнаружениях, использованных для обновления блока.
Типы данных: single | double
Maximum number of tracks - Максимальное количество дорожек1000 (по умолчанию) | положительное целое числоМаксимальное количество дорожек, которое может поддерживать трекер, указанное как положительное целое число.
Типы данных: single | double
Sensor configurations - Конфигурации датчиков слеженияstruct('SensorIndex',1,'IsValidTime',true) (по умолчанию) | структура | массив структурыКонфигурация датчиков слежения, заданная как структура или массив структур. Этот параметр предоставляет трекеру информацию о конфигурации датчика слежения, такую как пределы обнаружения датчика и разрешение датчика. Допустимые имена полей каждой структуры совпадают с именами свойств trackingSensorConfiguration объект. Если установить MaxDetsPerObject поле структуры в 1, трекер создает только один раздел, так что максимум одно обнаружение может быть назначено каждой цели.
Можно обновить конфигурацию через входной порт Sensor configuration, выбрав параметр Update sensor configuration with time.
Update sensor configurations with time - Обновление конфигураций датчиков во времениoff (по умолчанию) | onВыберите этот параметр, чтобы включить входной порт для отслеживания конфигураций датчика через входной порт конфигурации датчика.
Track state parameters - Параметры опорного кадра состояния путиПараметры опорного кадра состояния дорожки, заданные как структура или массив структуры. Блок передает значение этого параметра в StateParameters поле сформированных дорожек. Эти параметры можно использовать для определения опорной рамки, в которой сообщается о дорожке, или других требуемых атрибутов сгенерированных дорожек.
Например, можно использовать следующую структуру для определения прямоугольной опорной рамки, исходная позиция которой находится в [10 10 0] метров и чья начальная скорость [2 -2 0] метров в секунду относительно кадра сценария.
| Имя поля | Стоимость |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Параметры состояния дорожки можно обновить с помощью входного порта State Parameters, выбрав параметр Update track state parameters with time.
Типы данных: struct
Update track state parameters with time - Обновить параметры состояния дорожки во времениoff (по умолчанию) | onВыберите этот параметр, чтобы включить входной порт для параметров состояния отслеживания через входной порт State Parameters.
Simulate using - Тип выполняемого моделированияInterpreted Execution (по умолчанию) | Code GenerationВыберите тип моделирования для выполнения из следующих опций:
Interpreted execution - Моделирование модели с помощью интерпретатора MATLAB. Этот параметр сокращает время запуска. В Interpreted execution можно отладить исходный код блока.
Code generation - Моделирование модели с использованием сгенерированного кода C. При первом запуске моделирования Simulink генерирует код C для блока. Код C используется повторно для последующего моделирования до тех пор, пока модель не изменится. Для этого параметра требуется дополнительное время запуска.
Birth rate of new targets - Коэффициент рождаемости новых целевых показателей в плотности1e-3 (по умолчанию) | положительный вещественный скалярКоэффициент рождаемости новых целей в плотности, определяемый как положительный реальный скаляр. Коэффициент рождаемости указывает ожидаемое число целевых показателей, добавленных в плотности за единицу времени. Плотность при рождении создается с помощью FilterInitializationFcn конфигурации датчика, используемой с трекером. В общем случае трекер добавляет компоненты в функцию плотности двумя способами:
Прогнозирующая плотность рождения - эта плотность инициализируется FilterInitializationFcn функция при вызове без входов.
Адаптивная плотность при рождении - эта плотность инициализируется FilterInitializationFcn функция при вызове с входами обнаружения. Трекер выбирает обнаружения на основе их логарифмической вероятности связи с текущими оценками целей.
Значение параметра Коэффициент рождаемости новых целей представляет собой суммирование как прогнозирующей плотности рождаемости, так и адаптивной плотности рождения для каждого временного шага.
Пример: 0.01
Типы данных: single | double
Death rate of components - Коэффициент смертности компонентов в плотности1e-6 (по умолчанию) | положительный вещественный скалярКоэффициент смертности компонентов в плотности, определяемый как положительный действительный скаляр. Коэффициент смертности указывает скорость, с которой компонент исчезает в плотности после одного временного шага. Это уравнение иллюстрирует, как уровень смертности (Pd) связан с вероятностью выживания (Ps) компонента между последовательными временными шагами:
Pd) ΔT
где ΔT - временной шаг.
Пример: 1e-4
Типы данных: single | double
Threshold for initializing tentative tracks - Пороговое значение для инициализации предварительной дорожки0.5 (по умолчанию) | положительный вещественный скалярПорог инициализации предварительной дорожки, заданный как положительный действительный скаляр. Если вес компонента превышает пороговое значение, компонент помечается как 'Tentative' трек и дано TrackID.
Пример: 0.45
Типы данных: single | double
Threshold for track confirmation - Пороговое значение для подтверждения пути0.8 (по умолчанию) | положительный вещественный скалярПорог подтверждения дорожки, заданный как положительный действительный скаляр. В PHD-трекере трек может иметь несколько общих компонентов TrackID. Если весовое суммирование компонентов предварительной дорожки выше порога подтверждения, статус дорожки помечается как 'Confirmed'.
Пример: 0.85
Типы данных: single | double
Threshold for track deletion - Пороговое значение для удаления компонента1e-3 (по умолчанию) | положительный вещественный скалярПорог удаления компонента, заданный как положительный действительный скаляр. В PHD-трекере, если вес компонента ниже порога удаления, компонент удаляется.
Пример: 0.01
Типы данных: single | double
Threshold for components merging - Пороговое значение для объединения компонентов25 (по умолчанию) | положительный вещественный скаляр Порог объединения компонентов, заданный как положительный действительный скаляр. В PHD-трекере, если расстояние Kullback-Leibler между компонентами с тем же TrackID меньше порога слияния, затем эти компоненты объединяются в один компонент. Объединенный вес нового компонента равен сумме весов предварительно объединенных компонентов. Кроме того, если объединенный вес превышает первый порог, указанный в параметре Thresholds для управления метками, объединенный вес усекается до первого порога. Обратите внимание, что компоненты с TrackID из 0 также могут быть объединены друг с другом.
Пример: 30
Типы данных: single | double
Thresholds for label management - Пороговые значения для управления этикетками[1.1 1 0.8] (по умолчанию) | вектор 1 на 3 положительных значенийПороговые значения маркировки, определенные как вектор 1 на 3 уменьшающихся положительных значений, [C1, C2, С3]. На основе этого параметра трекер управляет компонентами в плотности, используя следующие правила:
Вес любого компонента, который выше первого порогового C1, уменьшается до C1.
Для всех компонентов с одинаковым TrackID, если наибольший вес среди этих компонентов больше C2, то компонент с наибольшим весом сохраняется для сохранения TrackID, в то время как все остальные компоненты удалены.
Для всех компонентов с одинаковым TrackID, если отношение наибольшего веса к суммированию веса всех этих компонентов больше C3, то компонент с наибольшим весом сохраняется для сохранения TrackID, в то время как все остальные компоненты удалены.
Если ни условие 2, ни условие 3 не выполняются, то компонент с наибольшим весом сохраняет TrackID, в то время как метки всех других компонентов имеют значение 0. Это означает, что некоторые компоненты могут представлять другие объекты. Этот процесс сохраняет возможность повторного извлечения этих незарезервированных компонентов в будущем.
Prediction time source - Источник времени прогнозированияAuto (по умолчанию) | Input portИсточник для времени прогнозирования, указанный как Input port или Auto. Выбрать Input port для ввода времени обновления с помощью входного порта прогнозируемого времени. В противном случае время обновления определяется часами моделирования, управляемыми Simulink.
Enable tentative tracks output - Включить выходной порт для предварительных дорожекoff (по умолчанию) | onВыберите этот параметр для активизации вывода предварительных дорожек через выходной порт предварительных дорожек.
Enable all tracks output - Включить выходной порт для всех дорожекoff (по умолчанию) | onВыберите этот параметр, чтобы включить вывод всех дорожек через выходной порт All Tracks.
Enable information output - Включить выходной порт для анализа информацииoff (по умолчанию) | onВыберите этот параметр, чтобы включить вывод информации анализа через порт вывода Info.
Source of output bus name - Наименование выходной шины путиAuto (по умолчанию) | PropertyИсточник имени шины выходного пути, указанный как:
Auto - Блок автоматически создает имя шины выходного пути.
Property - укажите имя шины выходной дорожки с помощью параметра Specify an output bus name.
Source of output info bus name - Наименование шины выходной информацииAuto (по умолчанию) | PropertyИсточник имени шины выходной информации, указанный как:
Auto - Блок автоматически создает имя шины выходной информации.
Property - укажите имя шины выходной информации с помощью параметра Specify an output info bus name.
Для включения этого параметра на вкладке Port Setting выберите Enable information output.
PHD-трекер использует итерационно-корректорный подход для обновления плотности гипотезы вероятности путем последовательной обработки информации обнаружения от нескольких датчиков. Рабочий процесс трекера выполняется следующим образом:
Трекер сортирует датчики в соответствии с их временем сообщения об обнаружении и соответственно определяет порядок коррекции.
Трекер рассматривает две отдельные плотности: плотность тока и плотность рождения. Плотность тока - это плотность целей, распространяемая с предыдущего шага времени. Плотность рождения - это плотность целей, которые, как ожидается, будут рождены в текущем временном шаге.
Для каждого датчика:
Трекер прогнозирует плотность тока для метки времени датчика, используя вероятность выживания, вычисленную из уровня смертности и прошедшего времени из последнего прогноза.
Трекер добавляет новые компоненты к плотности рождения с помощью FilterInitializationFcn без входных данных. Это соответствует прогнозируемой плотности рождения.
Трекер создает разделы обнаружений из текущего датчика с помощью функции секционирования обнаружения. Каждый раздел - это возможная сегментация обнаружений в ячейки обнаружения для каждого объекта. Если структура конфигурации датчика определяет MaxNumDetsPerObject как 1, трекер генерирует только один раздел, в котором каждое обнаружение является автономной ячейкой.
Каждую ячейку обнаружения оценивают по плотности тока, и вычисляют логарифмическое значение правдоподобия для каждой ячейки обнаружения.
Используя логарифмические значения правдоподобия, трекер вычисляет вероятность каждого раздела.
Трекер корректирует плотность тока, используя каждую ячейку обнаружения.
Для ячеек обнаружения с высоким отрицательным логарифмическим правдоподобием (большим, чем порог назначения) трекер добавляет новые компоненты к плотности рождения, используя FilterInitializationFcn параметр. Это соответствует адаптивной плотности при рождении.
После корректировки плотности тока с помощью каждого датчика трекер добавляет плотность рождения к плотности тока. Трекер следит за тем, чтобы количество возможных целей в плотности рождаемости было равно BirthRate × dT, где dT - временной шаг.
Плотность тока затем прогнозируется до текущего времени обновления.
Плотность гипотезы вероятности (PHD) - функция, определяемая по состоянию-пространству системы слежения, а её значение в состоянии определяется как ожидаемое количество целей на единицу объема состояния-пространства. PHD обычно аппроксимируется смесью компонентов, и каждый компонент соответствует оценке состояния. Обычно используемыми приближениями PHD являются гауссова смесь, SMC смесь, GGIW смесь и GIW смесь.
Чтобы понять PHD, возьмем в качестве примера гауссову смесь. Гауссова смесь может быть представлена
Pi)
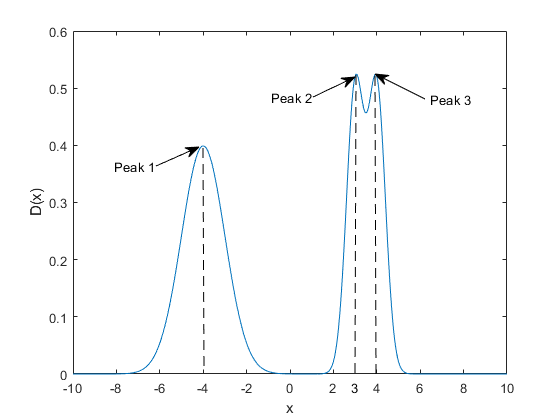
где M - общее число компонентов, N (x 'mi, Pi) - нормальное распределение со средним mi и ковариацией Pi, а wi - вес i-го компонента. Вес wi обозначает число, которое может быть дробным, целей, представленных i-ой составляющей. Интеграция D (x) по пространственно-государственному региону приводит к ожидаемому количеству целей в этом регионе. Интеграция D (x) по всему пространству состояний приводит к общему ожидаемому количеству целей (∑ wi), так как интеграция нормального распределения по всему пространству состояний равна 1. X-координаты пиков (локальных максимумов) D (x) представляют наиболее вероятные состояния целей.
Например, следующий рисунок иллюстрирует PHD функцию, заданную D (x) = N (x | − 4,2) + 0.5N (x | 3,0,4) + 0.5N (x | 4,0,4). Весовое суммирование этих компонентов равно 2, что означает, что, вероятно, существуют две цели. Из пиков D (x) возможные положения этих целей находятся при x = − 4, x = 3 и x = 4. Обратите внимание, что последние два компонента очень близки друг к другу, что означает, что эти два компонента могут быть приписаны одному объекту.
Поля структуры пути:
| Область | Определение |
|---|---|
SourceIndex | Уникальный индекс источника, используемый для различения источников отслеживания в среде нескольких трекеров. |
TrackID | Уникальный идентификатор дорожки, используемый для различения нескольких дорожек. |
BranchID | Уникальный идентификатор ветви дорожки, используемый для различения нескольких ветвей дорожки. |
UpdateTime | Время обновления дорожки. Единицы измерения в секундах. |
Age | Количество раз, когда дорожка выживала. |
State | Значение вектора состояния во время обновления. |
StateCovariance | Ковариационная матрица неопределенности. |
TrackLogic | Логический тип подтверждения и удаления, возвращенный как 'History' или 'Score'. |
TrackLogicState | Текущее состояние типа логики дорожки. На основе типа логики
|
IsConfirmed | Статус подтверждения. Это поле true если дорожка подтверждена как реальная цель. |
IsCoasted | Состояние движения по побережью. Это поле true если дорожка обновляется без нового обнаружения. |
IsSelfReported | Укажите, сообщается ли трекер о дорожке. Это поле используется в среде слияния дорожек. Возвращается как |
ObjectClassID | Целое значение, представляющее классификацию объектов. Стоимость 0 представляет неизвестную классификацию. Ненулевые классификации применяются только к подтвержденным трекам. |
ObjectAttributes | Дополнительная информация о дорожке. |
[1] Granstorm, K., К. Ландкуист и О. Оргунер. «Расширенное отслеживание цели с помощью PHD-фильтра гауссовой смеси». Сделки IEEE по аэрокосмическим и электронным системам. Том 48, номер 4, 2012, стр. 3268-3286.
[2] Грансторм, К. и О. Оргунер ". PHD-фильтр для отслеживания нескольких расширенных целей с помощью случайных матриц ". Транзакции IEEE при обработке сигналов. Том 60, номер 11, 2012, стр. 5657-5671.
[3] Грансторм, К. и А. Натале, П. Брака, Г. Людено и Ф. Серафино. «Гамма-гауссова гипотеза обратной вероятности Вишарта для расширенного сопровождения цели с использованием данных морской РЛС X-диапазона». Сделки IEEE по геологии и дистанционному зондированию. Том 53, номер 12, 2015, стр. 6617-6631.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
